Objeto de control de sistemas de control inteligentes. Conceptos: sistema inteligente (IntS), sistema de control inteligente (IntSU). La necesidad de un control inteligente
Este artículo también está disponible:
Rosenberg Igor Naumovich
Control inteligente// Tecnologías de control modernas.. ISSN 2226-9339
. — . Número de artículo: 7608. Fecha de publicación: 2017-04-10. Modo de acceso: https://site/article/7608/Introducción
La gestión inteligente es una generalización de la gestión semiótica, cognitiva y de la información. En la gestión inteligente del transporte se distinguen las siguientes áreas: sistemas de transporte inteligentes, control semiótico inteligente y control cognitivo inteligente. El control semiótico inteligente está asociado con diferentes formas de lógica, un sistema de productos y algoritmos evolutivos. El control cognitivo inteligente se considera una síntesis del control informático humano utilizando canales asociativos y análisis del conocimiento tácito. El control inteligente se considera un medio para tomar decisiones en condiciones de incertidumbre. Se considera que la gestión inteligente de la información respalda la gestión inteligente a través de la tecnología de la información.
La necesidad de un control inteligente
A medida que la sociedad se desarrolló y los objetos y las tareas de gestión se volvieron más complejos, las tecnologías de gestión también cambiaron. El problema de los “grandes datos” se ha agudizado en la gestión de situaciones complejas. Crea una barrera de información para las tecnologías de “gestión organizacional”. La gestión moderna se caracteriza por el crecimiento de información mal estructurada. Esto provoca una transición hacia una gestión inteligente, lo que, a su vez, conduce a la necesidad de utilizar tecnologías de gestión del conocimiento. La base de la gestión inteligente son los sistemas inteligentes y las tecnologías inteligentes. Un sistema inteligente es un sistema técnico o software-hardware capaz de obtener soluciones creativas a problemas pertenecientes a un área temática específica, cuyo conocimiento se almacena en la memoria de dicho sistema. De forma simplificada, la estructura de un sistema inteligente incluye tres bloques principales: una base de conocimientos, un solucionador y una interfaz inteligente. El solucionador es el componente dominante del sistema inteligente. En lógica de primer orden, un solucionador es un mecanismo para obtener soluciones a expresiones lógicas. En los sistemas multiagente, que se clasifican como inteligencia artificial, también se utiliza el concepto de solucionador. Un agente es un solucionador de problemas, que es una entidad de software capaz de actuar en aras de lograr los objetivos establecidos. En el modelado simbólico, el s-solver es el valor de especialización del mensaje. Efimov E.I. fue uno de los primeros en Rusia en introducir este concepto. . Esta breve lista muestra la importancia del solucionador para sistemas inteligentes y tecnologías inteligentes.
Control inteligente en el marco de la semiótica aplicada
La semiótica estudia la naturaleza, tipos y funciones de los signos, los sistemas de signos y la actividad de los signos humanos, la esencia de los signos de los lenguajes naturales y artificiales con el objetivo de construir una teoría general de los signos. En el campo de la semiótica existe la dirección de la “semiótica aplicada”, cuyo fundador es D.A. Pospélov.
En semiótica existen dos áreas de aplicación de los signos: cognición y comunicación. Esto divide la semiótica en dos partes: semiótica del conocimiento; Semiótica de las comunicaciones semánticas. La base del control inteligente es el sistema semiótico. Según Pospelov, el sistema semiótico W es un ocho ordenado de conjuntos:
W=< T, R, A, P, τ, ρ, α, π>, (1)
Dónde
T - conjunto de símbolos básicos;
R - conjunto de reglas sintácticas;
A - mucho conocimiento sobre el tema;
P es el conjunto de reglas para derivar soluciones (reglas pragmáticas);
τ—reglas para cambiar el conjunto T;
ρ—reglas para cambiar el conjunto R;
α son las reglas para cambiar el conjunto A;
π — reglas para cambiar el conjunto P.
Los dos primeros conjuntos generan el lenguaje del sistema W, y τ Y ρ realizar su cambio. Normas α cambiar muchos conocimientos sobre el tema. Si consideramos el conocimiento como axiomas de un sistema formal (que está formado por los primeros cuatro elementos de W), entonces las reglas α , cambian esencialmente la interpretación de los símbolos básicos y, por tanto, las fórmulas correctamente construidas del lenguaje del sistema semiótico W.
Los primeros cuatro conjuntos forman un sistema formal. FS, los elementos del cinco al ocho forman las reglas para cambiar el sistema formal. Al hacer esto, aseguran la adaptación del sistema formal, “ajustándolo” para resolver tareas y problemas que, dentro del marco del sistema, FS no se puede solucionar.
Así, el sistema semiótico (1) puede definirse como un sistema dinámico compuesto: W=
Por tanto, se puede dar una nueva interpretación al sistema semiótico. Sistema dinámico compuesto: W=
Normas MFsi = (τ, ρ, α, π), aquellos que cambian el estado del sistema formal (objeto de control) están conectados por una dependencia que existe en los elementos del triángulo semiótico (triángulo de Frege). Esto significa que la aplicación de una de las cuatro reglas hace que se apliquen las reglas restantes.
Estas dependencias son complejas, falta su representación analítica, lo cual es difícil y es objeto de investigación en sistemas semióticos de inteligencia artificial. Por lo tanto, es más sencillo utilizar el enfoque de información y el modelado de información.
Extensiones de sistemas de control formales en forma de componentes dinámicos. MFsi Proporcionar las propiedades de apertura de los sistemas. Crean la oportunidad de adaptar el objeto de control a las influencias de la gestión y a las condiciones externas cambiantes.
Esto, en particular, nos permite ampliar significativamente las posibilidades de apoyar la toma de decisiones en condiciones de incertidumbre, información incompleta e inconsistente de la información inicial.
Tipos de incertidumbres al implementar el control inteligente
Los métodos de control tradicionales, incluidos algunos tipos de control inteligente, se basan en el supuesto de que los modelos de estado y control de un objeto describen con precisión su comportamiento. Los métodos basados en este supuesto están incluidos en la teoría de control clásica. Sin embargo, en condiciones de volúmenes crecientes, crecimiento de información no estructurada y la influencia del entorno externo, las desviaciones de esta condición son características.
Casi cualquier modelo es una descripción simplificada de un objeto real, su estado y su comportamiento. El grado de simplificación puede ser aceptable o crear incertidumbre. En la dinámica del comportamiento de un objeto de control, algunas características del objeto pueden cambiar significativamente durante su funcionamiento. Todo esto crea incertidumbres en varios modelos de descripción de un objeto y dificulta su control, incluido el control intelectual. El modelo de control típico que subyace al algoritmo de control o al conjunto de reglas de control establecidas se denomina nominal.
En condiciones de incertidumbre significativa, los métodos clásicos de la teoría del control son inaplicables o producen resultados insatisfactorios. En estos casos, es necesario utilizar métodos especiales de análisis y síntesis de sistemas de control para objetos con modelos inciertos. El primer paso es evaluar el tipo y valor de la incertidumbre.
Existen principales tipos de incertidumbres en los modelos de gestión: paramétricas, funcionales, estructurales y de señalización.
La incertidumbre paramétrica significa que los parámetros constantes del modelo se desconocen o se determinan de manera imprecisa. Por ejemplo, en lugar de valores de puntos, hay valores de intervalo. Al pasar a sistemas de medición de información, podemos hablar de la falta de certeza de la información de los parámetros. Por lo tanto, en muchos casos, los valores reales de los parámetros pueden diferir significativamente de los nominales aceptados.
La incertidumbre de la señal significa que las acciones de gestión o los flujos de información en el sistema de control se ven afectados por interferencias que cambian significativamente las señales nominales. Las señales que desvían el proceso de control del nominal se denominan perturbaciones o interferencias. La diferencia es que la interferencia es pasiva y sólo cambia la relación señal-ruido. La perturbación cambia la señal con la misma interferencia.
Los sistemas de control inteligentes modernos deben garantizar el funcionamiento autónomo de muchos objetos técnicos relacionados. Esto da motivos para hablar de un sistema de control inteligente (ICS). Un sistema inteligente debe resolver problemas complejos, incluida la planificación, el establecimiento de objetivos, la previsión, etc. Por la versatilidad, adaptación y precisión de las soluciones, es recomendable utilizar un control inteligente polivalente.
La arquitectura multinivel del sistema de control inteligente consta de tres niveles: conceptual, informativo y operativo (Fig. 1). Un sistema construido con esta arquitectura controla el comportamiento de objetos técnicos complejos en condiciones de interacción autónoma y colectiva. El nivel conceptual es responsable de la implementación de funciones intelectuales superiores.
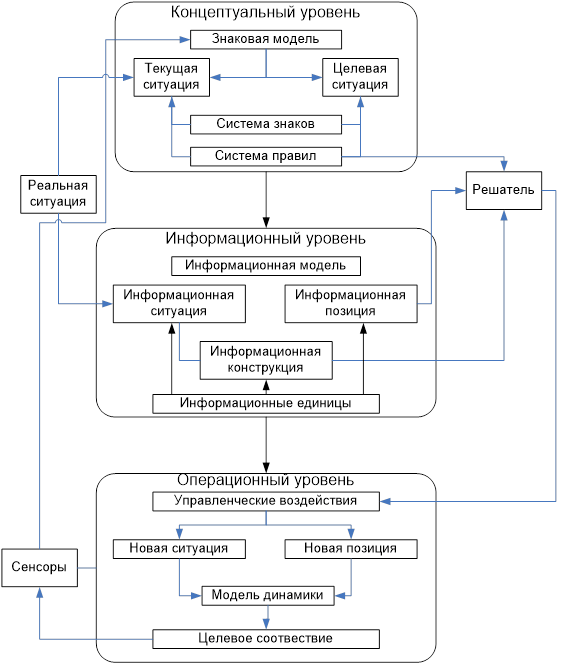
Figura 1. Control inteligente multinivel.
En el nivel conceptual se utiliza una representación semiótica (signos) del conocimiento y se intercambian mensajes con otros niveles. Los niveles de información y operativos contienen módulos que soportan diversos procedimientos intelectuales y de información y los transforman en gestión.
La principal tarea de la gestión a nivel conceptual es el almacenamiento, adquisición y uso del conocimiento conceptual presentado en forma semiótica (simbólica).
Sistema dinámico compuesto: W=
La adquisición de conocimientos se basa en un modelo de la situación real en el entorno externo. Las funciones intelectuales superiores incluyen las funciones de establecer la meta principal y las submetas, planificar el comportamiento y distribuir influencias en el plan general de acción.
A nivel de gestión de la información se resuelven problemas de modelado de la información, los principales de los cuales son: construcción de una situación de información, posición de la información, que corresponden al componente. FSi. A nivel de gestión de la información se resuelven las tareas de construcción de una estructura de información, la cual es un reflejo del sistema de reglas a nivel conceptual y corresponde al componente. Mfsi. El entorno lingüístico de control semiótico a nivel de información se realiza mediante el uso de varias unidades de información. Los cuales sirven como base para construir una situación de información, una posición de información y un diseño de información.
A nivel operativo (ejecutivo), se implementan decisiones de gestión (influencias gerenciales). Las influencias gerenciales cambian necesariamente la posición de la información del objeto de control. Las influencias de la gestión pueden cambiar, si es necesario, la situación de la información del objeto de control. Al mismo tiempo, la mayoría de las veces no es necesario cambiar la situación de la información. La tarea principal de este nivel es cambiar el estado y la posición del objeto de control e informar los cambios al nivel conceptual.
La arquitectura multinivel tiene una serie de características. Incluye una serie de funciones cognitivas humanas. Se basa en el uso de un enfoque de información para la gestión inteligente.
Vale la pena señalar la diferencia entre tecnologías intelectuales y de la información. Las tecnologías de la información cumplen las funciones de apoyar la gestión inteligente. El papel principal lo desempeñan las tecnologías inteligentes para la toma de decisiones. Permiten, junto con una decisión o en el proceso de obtención de una decisión, buscar nuevos conocimientos y acumular recursos intelectuales. Las tecnologías de la información crean solo recursos de información. Esto significa que el conocimiento formalizado de forma explícita, una vez dominado, puede convertirse en parte de la experiencia y parte de la base de conocimientos y ser utilizado por ésta para resolver problemas y tomar decisiones.
Conclusión
El control inteligente es eficaz y necesario cuando se gestionan objetos complejos para los que es difícil o imposible encontrar modelos operativos formales. La base de la gestión inteligente son los modelos semióticos en primer lugar y los modelos de información en segundo lugar. Los métodos de control inteligente son diversos y aplicables a sistemas técnicos, cognitivos y de transporte. El control inteligente se aplica ampliamente al control multipropósito. La gestión inteligente moderna se está integrando en plataformas y servicios en la nube. Al gestionar organizaciones y corporaciones distribuidas, es necesario tener en cuenta las relaciones espaciales y el conocimiento espacial. Otro problema es el número limitado de tecnologías inteligentes para trabajar con conocimiento tácito. Técnicamente, el problema de la gestión del conocimiento está relacionado con la transformación de recursos de información en recursos intelectuales y su aplicación en tecnologías inteligentes.
Bibliografía
- Pospelov D.A. Semiótica aplicada e inteligencia artificial // Productos y sistemas de software. – 1996. – N° 3. – C.10-13
- Tsvetkov V.Ya. Control cognitivo. Monografía - M.: MAKS Press, 2017. - 72 p. ISBN 978-5-317-05434-2
- Tsvetkov V.Ya. Gestión de la información. — LAP LAMBERT Academic Publishing GmbH & Co. KG, Saarbrücken, Alemania 2012 -201с
- Ósipov G.S. De la gestión situacional a la semiótica aplicada. Noticias sobre inteligencia artificial. 2002, nº 6.
- Nikiforov V. O., Slita O. V., Ushakov A. V. Control inteligente en condiciones de incertidumbre. - San Petersburgo: Universidad Estatal de San Petersburgo ITMO, 2011.
- McAfee A., Brynjolfsson E. Big data: la revolución de la gestión //Harvard Business Review. – 2012. – No. 90. – págs. 60-6, 68, 128.
- Tsvetkov V.Ya.Markelov V.M., Romanov I.A. Superación de barreras informativas // Aprendizaje a distancia y virtual. 2012. No. 11. P. 4-7.
- Forbes L. S., Kaiser G. W. Elección de hábitat en aves marinas reproductoras: cuándo cruzar la barrera de la información //Oikos. – 1994. – págs. 377-384.
- Tsvetkov V. Ya. Tecnología de control inteligente. // Revista Rusa de Sociología, 2015, vol. (2), es. 2.-р.97-104. DOI: 10.13187/rjs.2015.2.97www.ejournal32.com.
- Zilouchian A., Jamshidi M. Sistemas de control inteligentes que utilizan metodologías de computación blanda. – CRC Press, Inc., 2000
- Alavi M., Leidner D. E. Revisión: Gestión del conocimiento y sistemas de gestión del conocimiento: fundamentos conceptuales y cuestiones de investigación //MIS trimestral. – 2001. – p.107-136.
- Pospelov D.A. Modelado del razonamiento. Experiencia en el análisis de actos mentales. - M.: Radio y Comunicaciones, 1989. -184c.
- De Moura L., Bjørner N. Z3: Un solucionador SMT eficiente //Herramientas y algoritmos para la construcción y análisis de sistemas. – Springer Berlín Heidelberg, 2008. – págs. 337-340.
- Rosenberg I.N., Tsvetkov V.Ya. Aplicación de sistemas multiagente en sistemas logísticos inteligentes. // Revista Internacional de Educación Experimental. – 2012. – N° 6. – pág.107-109
- Efimov E.I. Solucionador de problemas intelectuales - M.: Nauka, redacción principal de literatura física y matemática, 1982. - 320 p.
- Pospelov D.A., Osipov G.S. Semiótica aplicada // Noticias de Inteligencia Artificial. - 1999. - No. 1.
- Tsvetkov V.Ya. Incertidumbre y certeza de la información en las ciencias de la información // Tecnologías de la información. - 2015. - No. 1. -p.3-7
- Tsvetkov V. Ya. Evaluación dicotómica de situaciones de información y superioridad de la información // Investigador europeo. Serie A. 2014, Vol.(86), No. 11-1, págs.1901-1909. DOI: 10.13187/er.2014.86.1901
- Tsvetkov V. Ya. Situación de la información y posición de la información como herramienta de gestión // Investigador europeo. Serie A. 2012, Vol.(36), 12-1, p.2166-2170
- Tsvetkov V. Ya. Construcciones de información // Revista europea de tecnología y diseño. -2014, Vol (5), No. 3. - p.147-152
- 22. Pospelov D.A. Modelos semióticos: éxitos y perspectivas // Cibernética. – 1976. – N° 6. – Págs.114-123.
- 23. Pospelov D.A. Modelos semióticos en la gestión. Cibernética. Cuestiones prácticas. - M.: Nauka, 1984. – P.70-87
- Osipov G.S.et al.Control inteligente de vehículos: estándares, proyectos, implementaciones // Instrumentación aeroespacial. – 2009. – No. 6. – págs. 34-43.
- Snytyuk V. E., Yurchenko K. N. Gestión inteligente de la evaluación del conocimiento // VE Snytyuk, KN Yurchenko − Cherkassy. – 2013.
- Pugachev I. N., Markelov G. Ya. Gestión inteligente de los sistemas de transporte urbano // Transporte y servicio: recogida. científico obras.–Kaliningrado: Editorial que lleva el nombre de I. Kant. – 2014. – No. 2. – págs. 58-66.
- Atiencia V., Diveev A.I. Síntesis de un sistema de control inteligente multipropósito //Problemas modernos de la ciencia y la educación. – 2012. – No. 6.
- Gribova V.V. et al. Plataforma en la nube para el desarrollo y gestión de sistemas inteligentes // Congreso científico y técnico internacional “Tecnologías semánticas abiertas para el diseño de sistemas inteligentes” (OSTIS-2011).-Minsk: BSUIR. – 2011. – Pág. 5-14.
TEMA 13. SISTEMAS DE CONTROL INTELIGENTES
Una nueva generación de sistemas, los sistemas inteligentes (SI), ha encarnado otros principios para organizar los componentes del sistema, han aparecido nuevos conceptos, términos y bloques que no se habían encontrado anteriormente en los desarrollos y, por tanto, en la literatura científica.
Los sistemas inteligentes son capaces de sintetizar un objetivo, tomar la decisión de actuar, proporcionar acciones para lograr el objetivo, predecir los valores de los parámetros del resultado de la acción y compararlos con los reales, formar retroalimentación, ajustar el objetivo o control
La Figura 13.1 muestra un diagrama de bloques del SI, donde se resaltan dos grandes bloques del sistema: la síntesis de objetivos y su implementación.
En el primer bloque, a partir de la evaluación activa de la información recibida del sistema sensorial, en presencia de motivación y conocimiento, se sintetiza un objetivo y se toma la decisión de actuar. La evaluación activa de la información se lleva a cabo bajo la influencia de señales de activación. La variabilidad del entorno y el propio estado del sistema pueden conducir a la necesidad de algo (motivación) y, si se dispone de conocimiento, se puede sintetizar un objetivo.
Se entiende por meta una anticipación mental ideal del resultado de una actividad. Si continúa evaluando activamente la información sobre el medio ambiente y el propio estado del sistema, incluido el objeto de control, al comparar opciones para lograr el objetivo, podrá tomar la decisión de actuar.
Además, en el segundo bloque, un sistema experto dinámico (DES), basado en información actual sobre el medio ambiente y su propio estado del SI, en presencia de un objetivo y conocimiento, realiza una evaluación experta y toma una decisión de gestión. , predice los resultados de la acción y desarrolla la gestión.
El control presentado en forma codificada se convierte en una señal física y se envía a los actuadores.
El objeto de control, al recibir una señal de los actuadores, realiza una u otra acción, cuyos resultados, presentados en forma de parámetros, se envían a la central diésel a través del circuito de retroalimentación 2, donde se comparan con los previstos. . Al mismo tiempo, los parámetros del resultado de la acción, interpretados de acuerdo con las propiedades de la meta y entrando en el bloque I, se pueden utilizar para una evaluación emocional del resultado logrado: por ejemplo, la meta se ha logrado, pero el resultado no es del agrado.
Si el objetivo se logra en todos los aspectos, se refuerza la gestión. De lo contrario, se produce una corrección de control. Cuando la meta es inalcanzable, se ajusta la meta.
Cabe señalar que con cambios bruscos en el estado del medio ambiente, o del objeto de control, o del sistema en su conjunto, es posible sintetizar un nuevo objetivo y organizar su consecución.
La estructura del SI, junto con nuevos elementos, contiene elementos y conexiones tradicionales, un sistema experto dinámico ocupa un lugar central en ella.
Bloque 1 - síntesis de objetivos Bloque II - implementación de objetivos
Figura 13.1 – Diagrama de bloques del CI
Formalmente, el SI se describe mediante las siguientes seis expresiones:
t X S METRO t ;
t METRO S CALLE ;
C t S R T;
t X= (Un T)X T+(B T)U T;
t Y = (D T)X T;
t R Y CON t ,
donde T es un conjunto de momentos en el tiempo;
X, S, M, C, R e Y: conjuntos de estados del sistema, entorno, motivación, objetivo, resultado previsto y real;
A, B y D - matrices de parámetros;
Operadores de conversión inteligentes utilizando el conocimiento.
Esta descripción combina representaciones de objetos del sistema en forma de un conjunto de valores, un conjunto de declaraciones o algunas otras formas.
Las propiedades dinámicas de un SI se pueden describir en el espacio de estados. Los operadores intelectuales que implementan la percepción, la representación, la formación de conceptos, los juicios y las inferencias en el proceso de cognición son un medio formal para procesar información y conocimiento, así como para tomar decisiones. Todos estos aspectos deberían formar la base para la construcción de DES que funcionen en tiempo real y en el mundo real.
Un sistema experto dinámico es una entidad compleja capaz de evaluar el estado del sistema y del medio ambiente, comparar los parámetros de los resultados deseados y reales de una acción, tomar decisiones y desarrollar una gestión que contribuya a lograr el objetivo. Para ello, el DES debe contar con un acervo de conocimientos y contar con métodos para la resolución de problemas. El conocimiento transferido al sistema experto se puede dividir en tres categorías:
1) el conocimiento conceptual (a nivel de conceptos) es el conocimiento incorporado en las palabras del habla humana o, más específicamente, en términos científicos y técnicos y, naturalmente, en las clases y propiedades de los objetos ambientales detrás de estos términos. Esto también incluye conexiones, relaciones y dependencias entre conceptos y sus propiedades, conexiones abstractas también expresadas en palabras y términos. El conocimiento conceptual es el ámbito de las ciencias principalmente fundamentales, dado que el concepto es el producto supremo del producto supremo de la materia: el cerebro;
2) el conocimiento fáctico y temático es un conjunto de información sobre las características cualitativas y cuantitativas de objetos específicos. Es con esta categoría de conocimiento que se asocian los términos “información” y “datos”, aunque este uso de estos términos menosprecia un poco su significado. Cualquier conocimiento lleva información y puede representarse en forma de datos; El conocimiento factual es con lo que las máquinas informáticas siempre han tenido que lidiar y con lo que todavía tienen que lidiar más que nada. La forma moderna de acumulación de datos suele denominarse bases de datos. Por supuesto, para organizar bases de datos y buscar en ellas la información necesaria hay que apoyarse en conocimientos conceptuales;
3) conocimiento algorítmico y procedimental: esto es lo que generalmente se llama con las palabras "habilidad", "tecnología", etc. En informática, el conocimiento algorítmico se implementa en forma de algoritmos, programas y subrutinas, pero no todos, pero aquellos que puede ser transferido de manos a mano y utilizado sin la participación de los autores. Esta implementación del conocimiento algorítmico se denomina producto de software. Las formas más comunes de productos de software son paquetes de software de aplicación, sistemas de software y otros enfocados a un área específica de aplicación de DES. La organización y uso de paquetes de software de aplicación se basa en conocimientos conceptuales.
Está claro que el conocimiento conceptual es la categoría superior y definitoria del conocimiento, aunque, desde un punto de vista práctico, otras categorías pueden parecer más importantes.
Probablemente esta sea la razón por la que el conocimiento conceptual rara vez se materializa en una forma que pueda ser procesada por computadoras. Y si está encarnado, lo más frecuente es que sea incompleto y unilateral. En la mayoría de los casos, una persona sigue siendo portadora del conocimiento conceptual. Esto ralentiza la automatización de muchos procesos.
Las representaciones del conocimiento conceptual, o más precisamente, los sistemas que implementan las tres categorías de conocimiento, pero resaltan el conocimiento conceptual y trabajan sobre la base de su uso intensivo, se denominan bases de conocimiento.
La creación y uso generalizado de bases de conocimiento en los sistemas de información es una de las tareas más urgentes. Llamaremos modelo de dominio a la parte conceptual de la base de conocimientos, sistema de software a la parte algorítmica y base de datos a la parte fáctica.
La siguiente función del DES es la resolución de problemas. Una máquina sólo puede resolver un problema si se plantea formalmente, si se escribe una especificación formal para él. Este último debe basarse en alguna base de conocimientos. El modelo de dominio describe el entorno general en el que surgió la tarea y la especificación describe el contenido de la tarea. En conjunto, permiten establecer qué conexiones y dependencias abstractas, en qué combinaciones y en qué secuencia deben usarse para resolver el problema.
Los programas de aplicación proporcionan las herramientas específicas detrás de estas dependencias y también contienen algoritmos para resolver las ecuaciones resultantes. Finalmente, la base de datos proporciona todos o parte de los datos de entrada para ejecutar estos algoritmos; los datos faltantes deben estar contenidos en la especificación.
Estas tres partes de la base de conocimientos corresponden a tres etapas de resolución del problema:
1) construcción de un programa de solución abstracto (incluido el surgimiento del problema, su formulación y especificación);
2) traducción del problema a un lenguaje de máquina adecuado;
3) difusión y ejecución del programa.
La construcción de un programa abstracto está asociada a la representación y procesamiento del conocimiento conceptual en un SI y, por definición, es propiedad de la inteligencia artificial.
La inteligencia artificial está asociada al procesamiento de textos, mensajes orales en lenguaje natural, al análisis y procesamiento de información (reconocimiento de todo tipo de imágenes, demostración de teoremas, inferencia lógica, etc.).
Las funciones del DES son también evaluar los resultados de la resolución de un problema, formar parámetros para el resultado futuro de una acción, tomar decisiones de gestión, desarrollar la gestión y comparar los parámetros de los resultados deseados y reales. Se trata de modelar procesos para evaluar las posibles consecuencias y la corrección de la solución del problema.
Tenga en cuenta que en casos reales existe el problema de describir los objetos en estudio. Esta descripción no se considera legítimamente parte de la especificación de la tarea, ya que, por regla general, se plantean muchas tareas relacionadas con un objeto, lo que, por supuesto, debe tenerse en cuenta a la hora de formar una base de conocimientos. Además, puede resultar que el problema que ha surgido no se pueda resolver de forma totalmente automática, por ejemplo, debido a que la especificación o descripción del objeto está incompleta.
Por lo tanto, en el SI es recomendable en determinadas etapas tener un modo interactivo de trabajo con DES. Debemos recordar que el modelo de dominio describe la situación general (conocimiento) y la especificación describe el contenido de la tarea. Problemas muy importantes son la creación de un entorno de software unificado y la síntesis de algoritmos basados directamente en el planteamiento del problema.
Dependiendo del objetivo al que se enfrenta el SI, la base de conocimientos, los algoritmos para resolver un problema, tomar una decisión y desarrollar el control pueden, naturalmente, tener una representación diferente, lo que, a su vez, depende de la naturaleza de la resolución del problema. En consecuencia, se pueden observar tres tipos de DES. La estructura del DES del primer tipo se muestra en la Figura 13.2.

Figura 13.2 – Estructura del DES del primer tipo
Aquí se supone que el conocimiento conceptual y fáctico refleja con precisión los procesos y la información relacionados con un área temática determinada.
Luego la solución al problema planteado en esta área se obtendrá sobre la base de métodos matemáticos rigurosos, de acuerdo con la formulación y especificación. Los resultados del estudio de decisiones y el pronóstico se utilizan para obtener una evaluación de expertos y tomar una decisión sobre la necesidad de gestión. Luego, basándose en un algoritmo de control adecuado disponible en la base de conocimientos, se genera una acción de control.
La eficacia y consistencia de este impacto, antes de que llegue al objeto de control, se evalúa mediante un modelo de simulación matemática. La evaluación debe realizarse más rápido que los procesos reales en el SI.
Sin embargo, los DES que implementan la toma de decisiones son sistemas de software complejos diseñados para la toma automática de decisiones o para ayudar a los tomadores de decisiones, y en la gestión operativa de sistemas y procesos complejos, por regla general, trabajan bajo estrictas limitaciones de tiempo.
A diferencia de los DES del primer tipo, diseñados para encontrar una solución óptima y basados en métodos matemáticos estrictos y modelos de optimización, los DES del segundo tipo se centran principalmente en resolver problemas difíciles de formalizar en ausencia de información completa y confiable (Fig. 13.3) . Aquí se utilizan modelos expertos, construidos sobre la base del conocimiento de expertos: especialistas en un área problemática determinada y métodos heurísticos para encontrar una solución.
Uno de los principales problemas al diseñar un DES del segundo tipo es la elección de un aparato formal para describir los procesos de toma de decisiones y construir sobre su base un modelo de toma de decisiones adecuado al área del problema (semánticamente correcto). Los sistemas de producción se utilizan habitualmente como tal dispositivo. Sin embargo, la investigación principal se lleva a cabo en el contexto de una interpretación algorítmica (determinista) del sistema de producción con su esquema secuencial inherente para encontrar una solución.
Los modelos resultantes son a menudo inadecuados para áreas problemáticas reales caracterizadas por el no determinismo en el proceso de encontrar una solución. La salida a esta situación es el paralelismo en la búsqueda.
En realidad, uno debería centrarse en combinar DES del primer y segundo tipo en un DES lógico de cálculo del tercer tipo, donde la base de conocimientos combina una descripción en forma de fórmulas matemáticas estrictas con información de expertos y también, en consecuencia, matemáticas. métodos para encontrar una solución con métodos heurísticos no rigurosos, con el peso de uno u otro el componente está determinado por la posibilidad de describir adecuadamente el área temática y el método para encontrar una solución (Fig. 13.4).

Figura 13.3 – Estructura de la central eléctrica diésel de segundo nivel
Al desarrollar DES, surgen los siguientes problemas:
1. determinar la composición de la base de conocimientos y su formación;
2. desarrollo de teorías y métodos nuevos y uso de los conocidos para describir procesos de información en sistemas de información;
3. desarrollo de formas de presentar y organizar el uso del conocimiento;
4. desarrollo de algoritmos y software con paralelización y uso de “lógica flexible”;
- encontrar entornos informáticos adecuados para implementar algoritmos paralelos en la formación de DES.

Figura 13.4 – Estructura de la central eléctrica diésel de tercer nivel
Junto con lo anterior, es importante señalar que DES debe tener la capacidad de adaptarse a un área problemática dinámica, la capacidad de introducir nuevos elementos y conexiones en la descripción de situaciones, cambiar las reglas y estrategias para el funcionamiento de los objetos en el proceso de toma de decisiones y desarrollo de la gestión, trabajo con información incompleta, poco clara y contradictoria, etc.
Los sistemas expertos dinámicos operan como parte de SI que tienen retroalimentación y, por lo tanto, es importante garantizar el funcionamiento estable de dichos SI.
Desde un punto de vista tradicional, podemos suponer que influye la duración de la reacción de la central diésel a la entrada, es decir, el tiempo dedicado a procesar la información de entrada y desarrollar una acción de control es un puro retraso. Con base en el análisis de frecuencia, es posible evaluar el cambio en las propiedades de fase del sistema y así determinar el margen de estabilidad. Si es necesario, puede corregir el sistema mediante filtros.
Sin embargo, desde el punto de vista de la teoría de control clásica, los SI son sistemas multiobjeto y multiconectados, cuyo análisis de estabilidad utilizando métodos convencionales es muy difícil.
Actualmente, la teoría del control robusto (-teoría del control, -control) es una de las ramas de la teoría del control que se desarrolla intensamente. Relativamente joven (los primeros trabajos aparecieron a principios de los años 80), surgió de urgentes problemas prácticos de sintetizar sistemas de control lineal multidimensionales que funcionan en condiciones de diversos tipos de perturbaciones y cambios de parámetros.
El problema de diseñar el control de un objeto complejo real que opera en condiciones de incertidumbre se puede abordar de otra manera: no intente utilizar un tipo de control: adaptativo o robusto. Evidentemente se debe elegir el tipo que corresponda al estado del medio ambiente y del sistema, determinado a partir de la información de que dispone el sistema. Si durante el funcionamiento del sistema es posible organizar la recepción de información, es recomendable utilizarla en el proceso de gestión.
Pero hasta hace poco, la implementación de dicho control combinado enfrentaba dificultades insuperables a la hora de determinar el algoritmo para elegir el tipo de control. Los avances logrados en el desarrollo de problemas de inteligencia artificial permiten sintetizar dicho algoritmo.
De hecho, fijémonos la tarea: diseñar un sistema que utilice un control adaptativo y robusto y seleccione el tipo de control basado en métodos de inteligencia artificial. Para ello, consideraremos las características de ambos tipos y, teniendo en cuenta sus cualidades específicas, determinaremos cómo construir un sistema de control combinado.
Uno de los conceptos principales de la teoría del control robusto es el concepto de incertidumbre. La incertidumbre del objeto refleja la inexactitud del modelo de objeto, tanto paramétrico como estructural.
Consideremos con más detalle las formas de especificar la incertidumbre en la teoría de control robusto utilizando un sistema simple, con una entrada y una salida (Figura 13.5).
Las señales tienen la siguiente interpretación: r - señal de entrada maestra; u - señal de entrada (entrada) del objeto; d - perturbación externa; y es la señal de salida (salida) del objeto que se está midiendo.

Figura 13.5 – Sistema con una entrada y una salida
En la teoría del control, la incertidumbre se especifica convenientemente en el dominio de la frecuencia. Supongamos que la función de transferencia de un objeto normal es P y consideremos un objeto perturbado cuya función de transferencia es
|
|
donde W es una función de transferencia fija (función de peso);
–función de transferencia estable arbitraria que satisface la desigualdad.
Consideraremos admisible tal perturbación. A continuación se muestran algunas opciones para modelos de incertidumbre:
| (1+W)P; P+W; P/(1+WP); P/(1+W). |
Se deben hacer suposiciones apropiadas para las cantidades y W en cada caso.
La incertidumbre de las señales de entrada d refleja la diferente naturaleza de las perturbaciones externas que actúan sobre el objeto y el controlador. Por tanto, un objeto indeterminado puede considerarse como un conjunto de objetos.
Elijamos una determinada característica de los sistemas de retroalimentación, por ejemplo la estabilidad. El controlador C es robusto respecto a esta característica si alguno del conjunto de objetos definidos por incertidumbre la tiene.
Así, el concepto de robustez implica la presencia de un regulador, un conjunto de objetos y la fijación de una determinada característica del sistema.
En este trabajo no abordaremos todo el conjunto de problemas resueltos en el marco de la teoría del control. Toquemos solo el problema de la sensibilidad mínima: construir un controlador C que estabilice un sistema cerrado y minimice la influencia de las perturbaciones externas en la salida y, en otras palabras, minimice la norma de la matriz de funciones de transferencia de las perturbaciones externas a la salida y. .
Una de las características de la solución de este, y de hecho de todo el conjunto de problemas de control robusto, es el hecho de que de antemano, en el proceso de diseño del controlador, establecemos restricciones sobre las influencias de entrada y la incertidumbre del objeto en la forma de desigualdades.
Durante la operación de un sistema robusto, la información sobre las incertidumbres del sistema no se utiliza para el control.
Naturalmente, esto lleva al hecho de que los sistemas robustos son conservadores y la calidad de los procesos transitorios a veces no satisface a los desarrolladores de estos sistemas.
Como un sistema de control adaptativo robusto, está diseñado para objetos cuya información o sobre los impactos no está disponible al comienzo de la operación del sistema. Muy a menudo, la propiedad de adaptación se logra mediante la formación, explícita o implícitamente, de un modelo matemático de un objeto o influencia de entrada.
Esto distingue tanto el control adaptativo de búsqueda, que se basa en la búsqueda y retención del extremo del indicador de calidad del control, como el control sin búsqueda, que se basa en la compensación de la desviación de los cambios reales en las coordenadas controladas de los cambios deseados correspondientes al nivel requerido del indicador de calidad. A continuación, según el modelo refinado, se ajusta el controlador adaptativo.
Por tanto, la característica principal de los sistemas de control adaptativo es la capacidad de obtener información durante la operación y utilizar esta información para el control.
Además, los sistemas adaptativos siempre utilizan información a priori sobre la incertidumbre del sistema. Ésta es la diferencia fundamental entre el enfoque adaptativo y el robusto.
Consideremos el sistema de control adaptativo más simple que proporciona seguimiento de la señal de entrada en presencia de ruido en la entrada del objeto (Figura 13.6).

Dibujo. 13.6–Sistema de control adaptativo
La diferencia formal con el circuito de la Figura 13.5 es el bloque de adaptación A, que, basándose en la señal de salida del objeto y la señal que caracteriza la calidad dada, genera una señal para ajustar los coeficientes del controlador adaptativo.
Teniendo en cuenta las desventajas de cada uno de los reguladores, es recomendable intentar aprovechar sus ventajas proponiendo un esquema combinado de control del objeto. Un sistema adaptativo, utilizando un bloque de adaptación, genera cierta información sobre el estado del entorno externo. En particular, en el caso considerado, es posible obtener información sobre la perturbación externa d. El algoritmo de control C a corresponde al estado actual del entorno externo, según el criterio establecido en el bloque de adaptación. Pero el sistema adaptativo requiere que la señal de entrada r tenga un rango de frecuencia bastante amplio e impone restricciones estrictas sobre el valor y el espectro de frecuencia de la señal de perturbación externa d. Por lo tanto, los sistemas adaptativos pueden operar sólo en rangos estrechos de la señal de entrada r y perturbaciones externas d. Fuera de estos rangos, el sistema adaptativo tiene una mala calidad de control e incluso puede perder estabilidad.
Las propiedades del control robusto y adaptativo discutidas anteriormente llevan a la conclusión de que durante el funcionamiento del sistema, en algunos casos es beneficioso utilizar un control robusto, en otros, adaptativo, es decir. Ser capaz de combinar el control en función del estado del entorno externo.
Control combinado. La pregunta principal a la hora de diseñar sistemas de control combinado es cómo, en base a qué conocimiento (información) seleccionar uno u otro tipo de control.
Las mayores oportunidades para esto las brindan los métodos de inteligencia artificial. Su ventaja sobre los algoritmos de conmutación simples es el uso de una amplia gama de datos y conocimientos para formar un algoritmo para seleccionar el tipo de control.
Si combinamos formalmente los circuitos que se muestran en las Figuras 13.5, 13.6, obtenemos un circuito de control combinado (Figura 13.7).
Como puede verse en la figura, la señal de control debe cambiar de un controlador robusto a uno adaptativo y viceversa, a medida que cambia el entorno durante el funcionamiento del sistema. Utilizando los métodos de la teoría de sistemas inteligentes, es posible asegurar una transición de un tipo de control a otro dependiendo de las condiciones de funcionamiento del sistema.
|
|

Figura 13.6 – Esquema de control combinado
Primero consideremos qué información se puede utilizar para operar la unidad inteligente del sistema. Como es sabido, los sistemas con una entrada y una salida están bien descritos en el dominio de la frecuencia. Por tanto, es natural utilizar características de frecuencia para organizar el proceso de toma de decisiones a la hora de elegir el tipo de control.
Como se mencionó anteriormente, la respuesta de frecuencia de un sistema con control robusto corresponde a la peor combinación de parámetros en la región de incertidumbre. Por lo tanto, el control robusto puede considerarse como uno de los límites del control seleccionado.
El otro límite está determinado por las capacidades del sistema en estudio (velocidad de conducción, fuente de alimentación, etc.). Entre estos dos límites hay un área donde tiene sentido utilizar el control adaptativo.
|
|

Figura 13.7 – Esquema de control combinado
Dado que el algoritmo adaptativo es sensible a la etapa inicial de funcionamiento del sistema, en esta etapa es aconsejable utilizar un control robusto, que es bastante insensible a la tasa de cambio de la interferencia externa. Pero su desventaja es la larga duración de los procesos transitorios y los grandes valores permitidos de las coordenadas de salida bajo la influencia de interferencias.
Después de un tiempo, tiene sentido pasar del control robusto al control adaptativo.
El control adaptativo le permite rastrear con mayor precisión la señal de entrada en presencia de información de interferencia. El control adaptativo exige la riqueza del espectro de la señal de entrada y, por ejemplo, con señales que cambian lentamente, los procesos de adaptación pueden fallar o ralentizarse considerablemente. En tal situación, es necesario volver a cambiar a un control robusto, que garantiza la estabilidad del sistema.
De lo anterior se desprende que para que el sistema funcione es necesario tener información sobre el espectro de frecuencia de la señal de interferencia útil y la relación señal-ruido.
Además, se requiere información preliminar sobre el espectro de frecuencias en el que opera el sistema adaptativo y sobre las características particulares del objeto de control en los límites de la región de incertidumbre. A partir de esta información, puede crear una base de datos en la que se ingresa de antemano información específica de cada clase de objetos. La información sobre el espectro de frecuencia de la señal útil, la interferencia y la relación señal-ruido ingresa a la base de datos durante el funcionamiento del sistema y se actualiza constantemente.
El contenido de la base de datos se puede utilizar en una base de conocimientos, que se forma en forma de reglas. Dependiendo de las propiedades específicas del sistema, puede configurar el cambio entre dos tipos de control. Las reglas requeridas se forman en uno de los sistemas lógicos adecuados para el caso considerado.
Contando con bases de datos y conocimiento, es posible desarrollar un mecanismo de toma de decisiones que asegure la elección correcta del tipo de control dependiendo de las condiciones de operación del sistema.
|
|

Figura 13.8 – Diagrama de bloques de un sistema con una unidad inteligente (IB)
La parte inteligente del sistema funciona de forma discreta, en intervalos de tiempo específicos. La Figura 13.8 muestra un diagrama de bloques de un sistema con una unidad de seguridad de la información inteligente que permite seleccionar el tipo de control.
En la entrada del bloque se reciben la señal r y la señal de salida medida del objeto y. En el bloque de preprocesamiento de información BPOI, basándose en las características de tiempo de las señales r(t), y(t), las características de frecuencia de la señal de entrada r(w) y la perturbación externa d(w), la posición relativa de los espectros r(w) y d(w) y los valores característicos de la relación señal-ruido r(w)/d(w). Toda esta información va a la base de datos. El bloque de toma de decisiones BPR, utilizando la base de conocimientos generada y los datos de la base de datos, desarrolla una decisión de acuerdo con cuál de los tipos de control se activa. En el siguiente intervalo, el proceso se repite utilizando nuevos datos.
UDC 004.896
I. A. Shcherbatov
CONTROL INTELIGENTE DE SISTEMAS ROBÓTICOS EN CONDICIONES DE INCERTIDUMBRE
Introducción
El control inteligente es el uso de métodos de inteligencia artificial para controlar objetos de diversas naturalezas físicas. En el campo del control de sistemas robóticos, los métodos de inteligencia artificial son los más utilizados. Esto se debe, en primer lugar, a la autonomía de los robots y a la necesidad de que resuelvan problemas creativos informales en condiciones de información incompleta y diversos tipos de incertidumbre.
Hasta hace poco, esta clase de tareas seguía siendo prerrogativa de la inteligencia natural: el operador del objeto de control, el ingeniero, el científico, es decir, el humano. Los avances modernos en el campo de la teoría del control automático, los métodos inteligentes para formalizar tareas semiestructuradas y controlar sistemas técnicos complejos hacen posible implementar sistemas robóticos muy complejos, que incluyen plataformas robóticas móviles, líneas automatizadas flexibles y robots Android.
Los sistemas robóticos operan en condiciones de información de entrada incompleta, cuando la imposibilidad fundamental de medir una serie de parámetros impone restricciones significativas al programa de control. Esto lleva a la necesidad de desarrollar una base de algoritmos que permitan calcular parámetros no medidos a partir de signos indirectos e indicadores medibles.
La incertidumbre del entorno externo en el que opera el sistema robótico obliga al sistema de control a incluir varios tipos de compensadores, módulos de adaptación, acumulación y clasificación de información.
Formulación del problema
El objetivo de la investigación fue desarrollar enfoques para la construcción de sistemas de control inteligentes para sistemas robóticos que sean invariantes con respecto a las características específicas de operación, teniendo en cuenta lo incompleto de la información de entrada y los diversos tipos de incertidumbre.
Para lograr este objetivo, es necesario resolver una serie de problemas interrelacionados: analizar las arquitecturas de sistemas de control inteligentes para sistemas robóticos; desarrollar un algoritmo generalizado para la identificación situacional de un sistema robótico; desarrollar un diagrama generalizado del sistema de control del sistema robótico; Desarrollar sistemas de control inteligentes para un robot de manipulación, una plataforma robótica móvil y una línea automatizada flexible.
Métodos de búsqueda
Durante la investigación se utilizaron métodos de la teoría general del control automático, la teoría de conjuntos difusos, las redes neuronales, el análisis de sistemas y la teoría de las evaluaciones de expertos.
Ubicación del sistema robótico en el entorno externo.
Para implementar algoritmos de control inteligentes, la tarea principal es la identificación actual de la situación en la que se encuentra el sistema robótico. Para solucionar este problema se ha desarrollado un diagrama de bloques del sistema de identificación situacional (Fig. 1).
La unidad técnica de visión y detección sensorial está diseñada para determinar cambios en el estado del entorno externo y presentar un mapa sensorial del entorno para su posterior procesamiento. El mapa sensorial del entorno es una imagen de la situación en la que se encuentra el robot en el momento actual. El intervalo de tiempo para construir un mapa sensorial se selecciona en función de las características específicas del área temática.
Base de conocimientos
Operador
Intelectual
interfaz
Identificador
algoritmos
Órganos de visión técnica y sensación sensorial.
Ambiente externo
Ejecutivo
mecanismos
Arroz. 1. Diagrama de bloques del sistema de identificación situacional.
La memoria de trabajo, por analogía con los sistemas expertos, está diseñada para procesar información proveniente de sensores y procesada utilizando la base de datos de algoritmos y la base de conocimientos (KB) existente del sistema robótico.
La base de algoritmos incluye algoritmos para el preprocesamiento del mapa del sensor (procesamiento de señales digitales, reconocimiento de patrones de sonido e imágenes), cálculo de parámetros no medidos (dependencias funcionales de los parámetros medidos), restauración de la integridad de la información (verificación de la integridad e inconsistencia del conocimiento, adaptación de conocimiento teniendo en cuenta la no estacionariedad y las condiciones externas variables), operaciones matemáticas, etc.
La base de conocimientos es una estructura jerárquica compleja que contiene información a priori sobre el entorno externo, establecida en la etapa de entrenamiento, conocimientos completos y consistentes adquiridos por el robot en el proceso de funcionamiento y percepción del entorno externo. Los conocimientos en la base de conocimientos se clasifican según criterios de relevancia y se actualizan teniendo en cuenta los cambios en las características específicas del funcionamiento del robot basándose en algoritmos de adaptación del conocimiento.
El bloque más importante es el identificador de situación. Es este bloque el que se encarga del correcto reconocimiento de la imagen de la situación a partir del mapa sensorial. La información resultante de este bloque es decisiva para elegir un programa de control para el sistema robótico.
Y por último, la interfaz inteligente, necesaria para comunicarse con el operador. El operador monitorea el funcionamiento del sistema robótico, así como también monitorea el proceso para lograr los objetivos establecidos. Como regla general, la comunicación entre un robot y un operador debe ocurrir utilizando una interfaz de lenguaje natural en un subconjunto limitado de lenguaje natural.
Estructura de un sistema de control de un sistema robótico en condiciones de incertidumbre.
La implementación de algoritmos y programas para el control inteligente de sistemas robóticos en condiciones de incertidumbre está asociada a una serie de dificultades importantes.
La complejidad de los algoritmos para el preprocesamiento de la información de entrada y la incertidumbre estructural del modelo de comportamiento del propio sistema robótico determinan la redundancia de la estructura del sistema de control inteligente.
Para resolver el problema de controlar un robot en condiciones de incertidumbre, se diseñó la siguiente arquitectura del sistema de control inteligente (Fig. 2).
Un sistema de identificación situacional (SIS) debería ser parte de cualquier sistema de control inteligente para un sistema robótico. El dispositivo de control inteligente (ICD) contiene una unidad de control y una unidad de selección de programa de control (CPSU). El objetivo de este bloque es desarrollar una acción de control para un sistema de accionamientos eléctricos (ED) que actúan sobre el sistema mecánico (MS) del robot.
Arroz. 2. Diagrama de bloques del sistema de control inteligente del sistema robótico.
Sistemas de control para manipuladores industriales.
Los sistemas de control tradicionales para manipuladores industriales se dividen en varias clases. La primera clase de sistemas son los sistemas de control de programas.
El sistema de control continuo del cuerpo de trabajo del manipulador implica alinear el manipulador con el modelo de referencia. En este algoritmo de control no se tienen en cuenta las pérdidas en el manipulador MS y se supone que todas las fuerzas desarrolladas por los accionamientos se transfieren al elemento de trabajo.
El sistema de control de fuerza programable en el cuerpo de trabajo se utiliza para controlar no solo el vector de fuerza, sino también el vector de posición del cuerpo de trabajo. El sistema de control independiente de movimiento y fuerza en el cuerpo de trabajo del manipulador para distintos grados de movilidad tiene dos circuitos de control con retroalimentación: por posición y por fuerza.
En el sistema de control acoplado de movimiento y fuerza en el cuerpo de trabajo del manipulador, la tarea para el vector de posición del cuerpo de trabajo se ajusta de acuerdo con el valor actual del vector de fuerza. Esto significa que cuando el cuerpo de trabajo se mueve, la magnitud de su carrera se ajusta de acuerdo con la fuerza de influencia sobre el entorno externo.
Los sistemas de control adaptativo se utilizan cuando se realizan las siguientes operaciones: recoger un objeto ubicado arbitrariamente o en movimiento, soldadura por arco de costuras con una posición variable, evitando obstáculos en movimiento e inesperados. Para ello se utilizan sistemas adaptativos con memoria asociativa.
También se utilizan sistemas de control robustos para controlar manipuladores industriales, que actualmente tienen un uso práctico generalizado.
Implementación de control inteligente
El problema del funcionamiento de un sistema robótico en condiciones de incertidumbre es multifacético.
Consideremos el problema de planificar el comportamiento de un sistema robótico en condiciones de incertidumbre. Para solucionar este problema, lo más apropiado es utilizar la tecnología de sistemas expertos dinámicos. La base de conocimientos de dicho sistema experto se ajusta con el tiempo. Si se utiliza una base de reglas de producción, entonces la composición de las reglas de producción se examina continuamente para verificar su integridad y coherencia. Además, gracias a los algoritmos de adaptación, las reglas obsoletas y obsoletas se actualizan y reemplazan. Al mismo tiempo, se presta especial atención a las cuestiones de la formación de un sistema experto sin profesor (autoformación) debido a que el seguimiento del sistema por parte de un especialista altamente cualificado no es económicamente viable.
El bloque de autoaprendizaje o autoajuste de la base de conocimientos del sistema experto requiere un estudio cuidadoso en la etapa de diseño del sistema de control inteligente del sistema robótico.
mi. La eficacia de la solución del problema a menudo depende de la calidad de ejecución de esta etapa del trabajo de diseño. Debe incluir subsistemas para evaluar la integridad e inconsistencia del conocimiento, evaluar la calidad de la gestión y corregir el conocimiento.
Cronológicamente, la siguiente etapa después de planificar el comportamiento puede ser el problema de emitir comandos de control a un sistema robótico en lenguaje natural. Para crear una interfaz en lenguaje natural, en nuestra opinión, la herramienta de implementación más adecuada es la teoría de conjuntos difusos.
Con la ayuda de variables lingüísticas que contienen un determinado conjunto de términos predeterminados, se realiza una descripción del área temática, un sistema limitado de comandos y objetos que influyen en el sistema robótico y cambian bajo su influencia. Los métodos de fasificación y desfasificación utilizados en este caso, así como los algoritmos de inferencia lógica difusa, tienen un impacto significativo en la precisión de las acciones de control y la velocidad de funcionamiento del sistema robótico.
Y por último, el uso de sistemas de control de redes neuronales para sistemas robóticos. La principal ventaja de una red neuronal es que no es necesario conocer ni crear un modelo matemático de un objeto, ya que la red neuronal es un aproximador difuso universal.
El objeto (sistema robótico) actúa como una "caja negra". Una red neuronal puede actuar como modelo de referencia para un sistema robótico controlado. Cabe señalar que debe ser una red neuronal multicapa de aprendizaje (identificador de objeto). El modelo de red neuronal se ajusta al objeto de control en función de la falta de coincidencia entre las señales de salida del objeto y el modelo. También forma una muestra de entrenamiento para ajustar y ajustar el dispositivo de control de acuerdo con el criterio de calidad seleccionado.
Conclusión
El análisis permitió sintetizar la arquitectura de un sistema de control inteligente para sistemas robóticos, invariante con respecto a las particularidades de funcionamiento. El algoritmo de identificación situacional desarrollado permite la construcción de mapas sensoriales altamente informativos del entorno externo. Se describen los principales enfoques para la formación de sistemas de control inteligentes para sistemas robóticos. Se muestran las direcciones para el desarrollo futuro de los métodos de inteligencia artificial más efectivos utilizados para la implementación de dispositivos de control.
BIBLIOGRAFÍA
1. Yurevich E. I. Fundamentos de la robótica. - San Petersburgo: BHV-Petersburgo, 2007. - 416 p.
2. Sistemas de manipulación de robots / ed. A. I. Korendyaseva. - M.: Ingeniería Mecánica, 1989. - 472 p.
3. Burdakov S. F. Síntesis de reguladores robustos con elementos elásticos: colección de artículos. científico tr. - N° 443. Mecánica y procesos de control. - San Petersburgo: Universidad Técnica Estatal de San Petersburgo, 1992.
4. Protalinsky O. M. Aplicación de métodos de inteligencia artificial en la automatización de procesos tecnológicos: monografía. - Astracán: Editorial ASTU, 2004. - 184 p.
El artículo fue recibido por el editor el 13 de enero de 2010.
GESTIÓN INTELECTUAL DE SISTEMAS ROBÓTICOS EN CONDICIONES DE INCERTIDUMBRE
I. A. Shcherbatov
El objetivo del trabajo presentado es la formación de enfoques para la construcción de sistemas de control intelectual de sistemas robóticos, invariantes en relación con la especificidad del funcionamiento, teniendo en cuenta la información incompleta de la entrada y varios tipos de incertidumbre. Se realiza el análisis, que permitió sintetizar la arquitectura de un sistema de control intelectual de sistemas robóticos invariante en relación a la especificidad de funcionamiento. El algoritmo elaborado de identificación situacional permite formar buenas tarjetas táctiles del entorno. Se describen los enfoques básicos para la formación de sistemas de control intelectual de sistemas robóticos. Se muestran las direcciones del desarrollo prospectivo de los métodos más eficaces de la inteligencia artificial aplicados a la realización de dispositivos de accionamiento.
Palabras clave: sistema robótico, robot, gestión intelectual, incertidumbre estructural, incompletitud de la información, tarjeta táctil, red neuronal, teoría de los conjuntos indistintos, sistema experto autodidacta.
Conceptos: sistema inteligente (IntS), sistema de control inteligente (IntSU)
El concepto de "sistema inteligente" es interpretado de forma diferente por distintos investigadores. Consideremos los principales, incluidas las explicaciones que los acompañan.
sistema inteligente es un sistema de información e informática con soporte inteligente para la resolución de problemas sin la participación de un operador (decisor - decisor). sistema inteligente es un sistema de información e informática con soporte inteligente para la resolución de problemas con la participación de un operador - tomador de decisiones. Las tecnologías inteligentes básicas, incluidas las redes neuronales artificiales (RNA), los algoritmos genéticos y la lógica difusa, se pueden utilizar eficazmente en la creación de sistemas de control. Al mismo tiempo, la viabilidad de su uso está determinada por la capacidad de implementar esquemas de cálculo distribuido, lo que permite ampliar el espacio de búsqueda sin aumentar significativamente la complejidad de los cálculos necesarios; la capacidad de describir procesos de control utilizando un lenguaje "simple", cercano al natural; la posibilidad de representación no analítica de objetos de control no lineales y descripción de procesos caracterizados por ambigüedad y una gran cantidad de situaciones especiales; la capacidad de buscar rápidamente en el espacio soluciones a problemas mal formalizados.
Sistemas inteligentes Estos son sistemas basados en el conocimiento. Cuando se procesa en una computadora, el conocimiento se transforma de manera similar a los datos: 1) Conocimiento en la memoria humana como resultado del pensamiento. 2) Portadores materiales de conocimientos (libros de texto, material didáctico). 3) Campo de conocimiento: una descripción condicional de los principales objetos del área temática, sus atributos y patrones que los conectan. 4) Representación del conocimiento basada en cualquier modelo (producción, semántico, marco u otro). El modelo de producción o modelo basado en reglas permite representar el conocimiento en forma de oraciones como "Si , Eso" Una red semántica es un grafo dirigido cuyos vértices son conceptos y cuyos arcos son relaciones entre ellos. Un marco es una estructura de datos para representar algún objeto conceptual. 5) Base de conocimientos sobre medios de almacenamiento informático. Cuando se utiliza el modelo de producción, la base de conocimientos consta de un conjunto de reglas. El programa que controla la enumeración de reglas se llama motor de inferencia (motor de razonamiento, motor de inferencia, motor deductivo, intérprete, intérprete de reglas, solucionador). La máquina de salida funciona cíclicamente. En cada ciclo, analiza los hechos existentes en la memoria de trabajo (base de datos) y las reglas de la base de conocimientos, y luego los compara. El conjunto de reglas seleccionadas constituye el llamado conjunto de conflictos (es decir, en una situación específica se pueden aplicar varias reglas a la vez). Para resolver un conflicto, el motor de inferencia tiene un criterio mediante el cual selecciona una única regla, tras lo cual se activa. Esto se expresa en la entrada de hechos (acciones recomendadas) que forman la conclusión de la regla en la memoria de trabajo o en el cambio del criterio para seleccionar reglas en conflicto. Si la conclusión de la regla incluye el nombre de una acción, entonces se activa. El motor de inferencia se basa en el principio de modus ponens, que se interpreta de la siguiente manera: "Si se sabe que el enunciado A es verdadero y existe una regla de la forma "si A, entonces B", entonces el enunciado B es verdadero".
Bajo Sistemas inteligentes Comprender cualquier sistema biológico, artificial o formal que exhiba la capacidad de participar en un comportamiento dirigido a objetivos. Este último incluye las propiedades (manifestaciones) de comunicación, acumulación de conocimientos, toma de decisiones, aprendizaje, adaptación. La investigación en inteligencia artificial se basa en un enfoque del conocimiento. La confianza en el conocimiento es el paradigma básico de la inteligencia artificial. En la obra, las interpretaciones del conocimiento se combinan en cuatro grupos (o niveles): psicológico, intelectual, lógico formal y tecnológico de la información. Interpretación psicológica del conocimiento: imágenes mentales, modelos mentales. La interpretación intelectual del conocimiento es un conjunto de información sobre un área temática determinada, incluidos hechos sobre los objetos de un área temática determinada, las propiedades de estos objetos y las relaciones que los conectan, descripciones de los procesos que ocurren en un área temática determinada, así como información. sobre formas de resolver problemas típicos. La interpretación lógica formal es información formalizada sobre un área temática determinada, que se utiliza para obtener (inferir) nuevos conocimientos sobre esta área temática mediante procedimientos especializados. Interpretación de la tecnología de la información: información estructural almacenada en la memoria de la computadora y utilizada en la operación de programas inteligentes.
En las obras de D.A. Pospélov y sus colegas describieron lo siguiente propiedades conceptuales del conocimiento: interpretabilidad interna, entendido como la presencia de nombres únicos que identifican cada unidad de información; estructura, lo que determina la posibilidad de anidamiento recursivo de unidades de información individuales entre sí; conectividad externa, definir la posibilidad de establecer relaciones funcionales, casuales y de otro tipo entre unidades de información; escalabilidad, caracterizar la posibilidad de introducir varias métricas para registrar relaciones cuantitativas, ordinales y de otro tipo de unidades de información; actividad, reflejando la capacidad de iniciar ciertas acciones apropiadas cuando aparece nueva información.
Sistema de información inteligente(o sistema basado en conocimiento) se basa en el concepto de utilizar una base de conocimiento para generar opciones para resolver problemas aplicados de varias clases, dependiendo de las necesidades de información específicas de los usuarios. El objetivo principal de la construcción de tales sistemas es identificar, estudiar y aplicar el conocimiento de expertos altamente calificados para resolver problemas complejos que surgen en la práctica. Al construir sistemas basados en el conocimiento, se utiliza el conocimiento acumulado por expertos en forma de reglas específicas para resolver ciertos problemas. Esta dirección pretende imitar el arte humano de analizar problemas no estructurados y semiestructurados.
En la teoría aplicada de los sistemas inteligentes (IntS), el sistema de control se considera sólo en estrecha interacción con el mundo externo que lo rodea, y el sistema inteligente se interpreta como un conjunto de sujetos activos y objetos (sujetos) opuestos a ellos, generados por la posibilidad situacional de la existencia activa de un sujeto, o por la tarea objetivo de algún sujeto sistémico o extrasistémico, y todos los elementos de cualquier naturaleza que componen el sistema intelectual están bajo la influencia del mundo externo común a ellos. .
En la obra de A.V. Timofeev y R.M. Yusupov dijo que IntSU incluye elementos de inteligencia artificial que permiten formar conceptos y acumular conocimientos, planificar comportamientos y tomar decisiones en condiciones inciertas, reconocer imágenes y formar un modelo del entorno. Introducción de elementos de inteligencia en los sistemas de control automático (ACS) amplía significativamente su funcionalidad en comparación con las armas autopropulsadas adaptativas. Como resultado de la intelectualización, las armas autopropulsadas adquieren la capacidad de resolver cierto tipo de tareas intelectuales que generalmente se asignaban a una persona. Por lo tanto, los IntSU se utilizan cada vez más en los casos en que la situación no permite (no justifica) la participación directa de un operador humano en el proceso de control o cuando es necesario reducir la intensidad del trabajo del operador cuando el objeto de control está funcionando en modos normales. .
La necesidad de intelectualización de los sistemas de control automático suele surgir en los casos en que los objetos de control son complejos (por ejemplo, objetos con dinámica no lineal que operan en condiciones de incertidumbre), y su descripción e interacción con el medio ambiente es difícil de estructurar y formalizar. Lo incompleto de la descripción se manifiesta tanto en la incertidumbre a priori del modelo del objeto y el medio ambiente, como en la incertidumbre y diversidad de los objetivos de gestión. A menudo, la descripción del comportamiento de tales objetos es vaga y contiene información cualitativa (evaluaciones de expertos, conclusiones plausibles, funciones de pertenencia). Resolver problemas de control en tales condiciones es imposible sin el uso de métodos de inteligencia artificial, es decir, sin la intelectualización de los sistemas de control autopropulsados.
Así, la intelectualización de los sistemas de control automático se reduce a la representación y procesamiento del conocimiento sobre el entorno, el objeto y el sistema de control utilizando los medios necesarios de aprendizaje y adaptación. Este conocimiento y herramientas permiten perfeccionar el modelo del objeto de control y el entorno y otorgar al ACS propiedades fundamentalmente nuevas, similares a las capacidades intelectuales de un operador o experto humano. Los rasgos característicos de IntSU son su capacidad para aprender y autoaprender a través de la formación de conocimientos, sintetizar e identificar patrones de comportamiento, reconocer y analizar situaciones, autoorganización y adaptación en relación a diversos factores. Estas habilidades permiten compensar diversos factores de incertidumbre interna y externa que surgen durante el funcionamiento del ACS y así mejorar u optimizar la calidad del control.
A continuación, llamaremos IntSU a un sistema en el que el conocimiento sobre las características desconocidas del objeto de control y el entorno se forma en el proceso de aprendizaje y adaptación, y la información obtenida se utiliza en el proceso de toma automática de decisiones de control para que el La calidad del control mejora. Tenga en cuenta que los procesos de aprendizaje y adaptación pueden ocurrir de forma aislada del proceso de control (por ejemplo, en el modo de entrenamiento con un maestro, generalmente interpretado por un operador humano o experto), o directamente en el proceso de control automático en tiempo real. .
Consideremos las características de la estructura funcional de los representantes típicos de la clase de sistemas de control inteligentes, interpretándolas en relación con los objetos de control tecnológico (unidades, máquinas, complejos de máquinas).
Programa No. 14 de investigación fundamental de OEMMP RAS
“ANÁLISIS Y OPTIMIZACIÓN DE LA OPERACIÓN DE SISTEMAS MULTINIVEL, INTELIGENTES Y DE CONTROL DE REDES EN CONDICIONES DE INCERTIDUMBRE”
1. Justificación del programa
1.1. Importancia científica y práctica.
El desarrollo intensivo de la tecnología (conexión en red, miniaturización de los ordenadores, aumento de su velocidad, etc.) plantea nuevas exigencias a los sistemas de control modernos y abre nuevas oportunidades tanto a nivel de los sistemas de control integrados (a nivel de los grandes centros de despacho) como a nivel de nivel de red (comunicaciones), red, grupo) interacción de sistemas descentralizados multiagente. Los sistemas de control adquieren cada vez más el carácter de sistemas de gestión de la información y se estudian en la intersección de las teorías de control, informática y comunicación. Por lo tanto, es necesario tener en cuenta las propiedades de los canales de comunicación, por ejemplo, en sistemas descentralizados (multiagentes), y las características de la computadora incorporada son importantes al implementar en sistemas de control multinivel funciones inteligentes como la visión técnica. , planificación de acciones, formación, toma de decisiones multicriterio, reflexión, etc. En particular, la intelectualización de la gestión tiene como objetivo aumentar el grado de autonomía del funcionamiento de los sistemas, cuando faltan modelos cuantitativos de dinámica o perturbaciones en el funcionamiento. del objeto de control, provocando una pérdida de adecuación de los modelos cuantitativos (por ejemplo, ecuaciones que describen la evolución de un sistema complejo), fortalecen el papel de los modelos cualitativos (los llamados "conocimientos", por ejemplo, lógico-lingüísticos) del objeto y del entorno utilizados en los niveles superiores del sistema de control.
El programa tiene como objetivo resolver problemas fundamentales que surgen en las áreas prioritarias de ciencia, tecnología e ingeniería de la Federación de Rusia. La tarea consiste en obtener nuevos resultados fundamentales y aplicados en el campo de la teoría del control de sistemas técnicos complejos, hombre-máquina y otros, teniendo en cuenta la incertidumbre y la falta de información inicial, incluyendo: la teoría del análisis y la síntesis de sistemas estocásticos. , la teoría de la creación de sistemas de control de movimiento y procesos tecnológicos, con diagnóstico actual y seguimiento del estado técnico, así como la teoría de la creación de sistemas de diseño automatizados y control inteligente basados en tecnologías de la información modernas.
Debido a la diversidad de usos de la teoría de control, análisis y optimización en diversas aplicaciones (transporte, logística, fabricación, sistemas aeronáuticos y espaciales, submarinos y buques de superficie, etc.), es necesario tener en cuenta una gran cantidad de factores de complejidad. , como:
· gestión multinivel,
· descentralización,
· no linealidad,
· multiplicidad,
· distribución de parámetros,
· diferente escala de procesos en el espacio y el tiempo,
· alta dimensión,
· heterogeneidad de la descripción de los subsistemas,
· multimodo,
· presencia de influencias impulsivas,
· presencia de perturbaciones coordinadas-paramétricas, estructurales, regulares y singulares,
· uso de modelos deterministas y probabilísticos para describir la incertidumbre de la información sobre el vector de estado y los parámetros del sistema, sobre las propiedades de los errores de medición y el entorno externo,
presencia de efectos de retardo en el control u objeto,
· complejidad estructural general de los sistemas de control modernos.
Para lograr el objetivo planteado y resolver las principales tareas, el Programa incluye investigación y desarrollo en las siguientes áreas principales:
1. Análisis y optimización del funcionamiento en diferentes escalas temporales de sistemas de control multinivel con información incompleta.
2. Gestión y optimización en sistemas multinivel y descentralizados de carácter organizativo y técnico.
2.1. Gestión y optimización en sistemas centrados en red.
2.2. Control inteligente de objetos en movimiento.
2.3. Modelado y optimización de sistemas de información y control multinivel en tiempo real.
Dirección 1. Análisis y optimización del funcionamiento en diferentes escalas de tiempo de sistemas de control multinivel con información incompleta
La complejidad de muchos sistemas de control modernos a menudo no permite obtener de antemano una descripción completa de los procesos que ocurren dentro del sistema y su interacción con el medio ambiente. Como regla general, los sistemas reales se describen mediante ecuaciones dinámicas no lineales y, con frecuencia, los modelos matemáticos de sistemas de control tienen en cuenta sólo los rangos permisibles de cambios en los parámetros y características de los elementos individuales, sin especificar estos parámetros y características en sí.
Además, en algunos sistemas, en particular los micromecánicos y cuánticos, el uso de métodos clásicos de descripción en tiempo continuo o discreto se complica por el hecho de que las fuerzas de interacción internas y/o externas que surgen, así como las acciones de control, son fugaces, Es de naturaleza impulsiva y no se puede calcular con precisión. El sistema parece funcionar en diferentes escalas de tiempo: real (lento) y rápido (pulso). Esta diversidad temporal es una propiedad interna de muchos sistemas de control modernos, incluidos los sistemas con control multinivel, en los que los niveles superiores utilizan modelos cualitativos y discretos, y los niveles inferiores suelen utilizar modelos cuantitativos con tiempo continuo.
Por esta razón, el desarrollo de métodos para la formalización matemática de la descripción del funcionamiento de dichos sistemas en tiempo híbrido (continuo-discreto), el estudio de sus propiedades de controlabilidad y estabilidad en condiciones de información incompleta, contrarrestación y restricciones no estándar. sobre controles y variables de fase es una tarea urgente. Una tarea igualmente urgente es el desarrollo de métodos para sintetizar el control óptimo de tales sistemas discretos continuos, tanto deterministas como estocásticos.
Además, en condiciones de incertidumbre y falta de información a priori, las tareas de optimización del proceso de recopilación y procesamiento de información (gestión de la observación y filtrado óptimo) son muy relevantes.
Dirección 2. Gestión y optimización en sistemas multinivel y descentralizados de carácter organizativo y técnico.
2.1. Gestión y optimización en sistemas centrados en red.
Los sistemas organizativos y técnicos complejos y modernos se caracterizan por sus altas dimensiones, descentralización, gestión multinivel, la necesidad de una planificación eficaz de las actividades teniendo en cuenta la formación, decisiones multicriterio y la reflexión de los sujetos a gestionar.
Los problemas de planificación y control de sistemas multiconectados distribuidos discretos y continuos de gran dimensión también se caracterizan por los procesos multiescala no sólo en el tiempo, sino también por la distribución y la naturaleza multiescala del espacio y representan uno de los más complejos. y clases de problemas de optimización que requieren mucha mano de obra. Por esta razón, es aconsejable desarrollar métodos y enfoques de investigación para encontrar soluciones exactas y aproximadas, así como herramientas de simulación para su uso en sistemas de apoyo a la toma de decisiones para la planificación, diseño y gestión de sistemas técnicos, organizativos (incluidos el transporte y la logística) y de información complejos. .
Gestionar la interacción grupal de componentes de sistemas organizativos y técnicos descentralizados (sistemas centrados en redes, sistemas de producción, informática, telecomunicaciones y otras redes, etc.) en condiciones de restricciones en los canales de comunicación y la complejidad de los cálculos, las características de los procesos de procesamiento de información. , así como restricciones en el tiempo para la toma de decisiones, capacidades informáticas y capacidad de los canales de comunicación. Por lo tanto, es relevante desarrollar métodos para optimizar (teniendo en cuenta las limitaciones enumeradas) la estructura de sistemas organizativos y técnicos complejos, incluso con la consideración simultánea de muchos criterios: detalle de los datos iniciales, eficiencia de la recopilación de información, planificación y toma de decisiones reflexivas. fabricación, productividad limitada de las computadoras individuales, reducción de la duplicación del trabajo, así como la proporción de cálculos auxiliares asociados con el servicio de transmisión de datos.
Los sistemas multinivel y descentralizados se caracterizan por la toma de decisiones distribuida en tiempo real en condiciones de contrarresto de información, así como por información incompleta y heterogénea, a menudo de naturaleza cualitativa y subjetiva de múltiples criterios. Por esta razón, es necesario desarrollar métodos para crear sistemas adecuados de soporte de información y apoyar la toma de decisiones estratégicas y operativas en condiciones de información y contrarrestación incompletas. Para ello, es aconsejable, en particular, desarrollar: modelos multiagente de sistemas organizativos y técnicos dinámicos, incluidos modelos de red con agentes en conflicto, modelos de comportamiento grupal y su previsión, evaluación del equilibrio de intereses y formación de coaliciones en estos sistemas, así como el desarrollo de tecnologías de la información y medios para presentar información sobre el entorno externo y el conocimiento de agentes inteligentes.
2.2. Control inteligente de objetos en movimiento.
No siempre se pueden crear modelos cuantitativos para resolver los problemas asignados, por lo que, junto con los métodos tradicionales, el Programa utiliza métodos de inteligencia artificial. La inteligencia artificial, como campo del conocimiento, ha experimentado un gran salto en los últimos cincuenta años, tanto en el desarrollo y clarificación del concepto mismo de inteligencia, como en el campo de la aplicación práctica de la inteligencia artificial en diversos campos de la actividad humana: en tecnología, economía, negocios, medicina, educación, etc. Muchos conceptos y métodos teóricos de la inteligencia artificial se han transformado en tecnologías inteligentes aplicadas basadas en el conocimiento.
La peculiaridad de la generación moderna de sistemas inteligentes es que se basan en un modelo complejo del entorno externo, que tiene en cuenta tanto información cuantitativa como modelos cualitativos: conocimiento sobre el posible comportamiento de varios objetos ambientales y sus relaciones entre sí. El uso de tales modelos fue posible gracias al desarrollo de métodos para representar el conocimiento, métodos para integrar datos de diferentes fuentes y un aumento significativo en la velocidad y la capacidad de memoria de las computadoras.
La presencia de un modelo del entorno externo permite que los sistemas inteligentes modernos para controlar objetos en movimiento tomen decisiones en condiciones de múltiples criterios, incertidumbre y riesgo, y la calidad de estas decisiones puede exceder la calidad de las decisiones tomadas por una persona en condiciones de Sobrecarga de información, tiempo limitado y estrés.
En este sentido, una tarea urgente es desarrollar nuevos medios y métodos para desarrollar el control inteligente de objetos en movimiento en presencia de los factores enumerados anteriormente.
2.3. Modelado y optimización de sistemas de información y control multinivel en tiempo real.
La relevancia de la investigación en esta dirección se debe a la necesidad de desarrollar métodos para el análisis y síntesis de sistemas de control e información en tiempo real modulares abiertos de múltiples niveles (ICS RV) de objetos multimodo y multipropósito que operan en condiciones de incertidumbre, perturbaciones estructurales y situaciones de emergencia (ESS). Entre estos objetos de control se encuentran los objetos críticos y los sistemas de uso responsable que determinan la seguridad del Estado.
Es obvio que los problemas y tareas de la creación de sistemas de esta clase se pueden resolver con éxito sobre la base del desarrollo de una teoría unificada y métodos aplicados orientados a programas de análisis dinámico y de escenarios y síntesis de la estructura de dichos sistemas, su algorítmica. , soporte de software e información, y mecanismos para desarrollar acciones de gestión efectivas. Estos, en primer lugar, incluyen el desarrollo de una metodología formalizada para el diseño de sistemas abiertos de gestión de información, incluidos modelos y métodos para sintetizar la estructura modular óptima de I&C RT orientada a objetos con una arquitectura abierta de acuerdo con varios criterios de eficiencia. Con base en los resultados obtenidos en la etapa de análisis dinámico, se sintetiza la estructura modular funcional óptima de procesamiento y control de datos, es decir, se determina la composición óptima y el número de módulos del RT IMS, se sintetiza la interfaz del sistema y la estructura. Se determina su software y soporte de información para procesar flujos de entrada de solicitudes.
Para planificar acciones y apoyar la toma de decisiones en condiciones de incertidumbre, perturbaciones estructurales y situaciones de emergencia, es recomendable utilizar métodos de análisis de escenarios y síntesis de acciones de control efectivas en el ICS RV. En este caso, se formará un modelo matemático de propagación de perturbaciones estructurales y situaciones de emergencia en el lenguaje de gráficos ponderados o funcionales con signos. A partir de este modelo, se sintetizarán escenarios racionales para la gestión de objetos utilizando los conceptos de potencial de rendimiento, durabilidad y supervivencia de sus elementos constitutivos. La síntesis de escenarios para eliminar las causas y consecuencias de situaciones de emergencia en objetos objetivo multimodo se llevará a cabo teniendo en cuenta las limitaciones de tiempo y recursos determinadas dinámicamente. También es necesario desarrollar formulaciones y métodos para resolver problemas inversos de control de la capacidad de supervivencia de objetos multimodo y multipropósito que operan en condiciones de incertidumbre, perturbaciones estructurales y situaciones de emergencia.
La especificidad de los sistemas y objetos de control señalados anteriormente, la importancia científica y práctica de resolver problemas de control, análisis y optimización para ellos nos permiten formular las siguientes metas y objetivos principales del Programa.
1.2. Principales metas y objetivos.
El objetivo principal del Programa es resolver problemas fundamentales de la teoría del control que dificultan la implementación de proyectos prometedores de importante importancia nacional en el campo de la gestión de sistemas complejos, dinámicos e inteligentes con aplicaciones para controlar el movimiento de objetos y procesos técnicos en los ámbitos tecnológico y organizacional. sistemas.
Se llevarán a cabo investigaciones sobre los siguientes temas generales.
Dirección 1
· Desarrollo de métodos para estabilizar sistemas no lineales en situaciones de medición incompleta de coordenadas y restricciones en la estructura permisible de fuerzas de control.
· Desarrollo de métodos para la observación y el control robustos y adaptativos bajo modelos deterministas, probabilísticos y otros de incertidumbre de los parámetros del objeto de control y del entorno operativo.
· Desarrollo de métodos y algoritmos para el análisis cualitativo y cuantitativo de modelos dinámicos continuos-discretos multinivel y discretos y síntesis de control basados en el método de reducción con funciones de comparación vectoriales y matriciales y transformaciones de modelos.
· Estudio del problema del control óptimo de una nueva clase de sistemas mecánicos que se mueven en medios resistivos cambiando la configuración o movimiento de cuerpos internos.
· Desarrollo de métodos para la formalización matemática y solución de problemas de interacción de impacto de sistemas mecánicos en presencia de fricción seca.
· Desarrollo de métodos para el control óptimo de sistemas dinámicos discretos-continuos y de impulsos.
· Desarrollo de métodos para el control garantizado de objetos no lineales expuestos a perturbaciones incontroladas en forma de juegos dinámicos.
· Desarrollo de la teoría del control de sistemas cuánticos.
· Desarrollo de métodos y algoritmos para analizar propiedades dinámicas como estabilidad, invariancia, disipación para evaluar el estado y sintetizar el control multinivel de sistemas con una descripción heterogénea de la dinámica de procesos en diferentes niveles.
Dirección 2.1
· Métodos para la resolución de problemas de control de sistemas centrados en redes de gran escala con parámetros distribuidos y procesos multiescala (en espacio y tiempo).
· Modelos y métodos de comunicación-red de gestión inteligente descentralizada de proyectos y programas distribuidos.
· Métodos para optimizar la estructura de sistemas multinivel y descentralizados.
· Métodos y estructuras de implementación informática de control centrado en red en un espacio matemáticamente homogéneo de computación distribuida y paralela.
· Modelos y métodos de toma de decisiones grupales basados en información incompleta, heterogénea, cualitativa y subjetiva.
· Modelos y métodos para planificar y gestionar complejos de operaciones interrelacionadas en sistemas técnicos y de transporte y logística complejos.
· Desarrollo de principios, arquitectura, métodos y algoritmos para la creación de sistemas inteligentes de software distribuido basados en tecnologías multiagente.
· Desarrollo de modelos y métodos de gestión de la información en estructuras de redes multiagente.
Dirección2.2
· Desarrollo de modelos generalizados de gestión situacional, que reflejan las características de inclusión de elementos difusos, de redes neuronales y lógico-dinámicos en la estructura de los modelos.
· Desarrollo de un método de planificación de rutas que asegure la propiedad de estabilidad de la comunicación de un grupo de objetos dinámicos controlados, heterogéneos (cuantitativos y cualitativos) en su representación modelo.
· Desarrollo de métodos de análisis y síntesis de plataformas adaptativas de modelado en tiempo real que tengan en cuenta la no linealidad, la multiconectividad y la alta dimensionalidad de los objetos de control con aplicación a objetos marinos en movimiento.
· Optimización de sistemas inteligentes para el control multinivel de objetos en movimiento en un entorno de conflicto, teniendo en cuenta su interacción grupal, multicriterio, incertidumbre y riesgo.
· Desarrollo de métodos para proporcionar visión técnica a sistemas de control inteligentes.
· Desarrollo de métodos para el control inteligente de objetos dinámicos que realizan maniobras complejas, basados en la organización del movimiento forzado en el espacio de estados del sistema.
Dirección2.3
· Modelos y métodos para analizar y optimizar la estructura modular de sistemas de información y control en tiempo real, multinivel y orientados a objetos, con arquitectura abierta, en condiciones de incertidumbre y perturbaciones estructurales.
· Métodos de análisis y optimización de los modos de funcionamiento de los sistemas de energía eléctrica y su gestión.
· Modelos y métodos del enfoque escenario-indicador para la búsqueda de puntos de vulnerabilidad para las tareas de gestión.
· Métodos de modelado, análisis y optimización de procesos multimodo para el control de objetos en movimiento.
· Desarrollo de métodos y algoritmos para la identificación inteligente de objetos no lineales no estacionarios para mejorar la eficiencia del control formando una base de conocimiento tecnológico basada en información a priori sobre el objeto de control.
· Tecnologías de geoinformación para modelar complejos naturales-tecnogénicos en problemas de gestión de ecosistemas de megaciudades.
· Análisis y optimización de la información de soporte de los sistemas de navegación y control.
· Modelos y métodos de gestión de procesos productivos.
Los resultados de la teoría desarrollada y los métodos de análisis y síntesis de sistemas de control se utilizarán en las siguientes áreas:
· control de tráfico en aviación y astronáutica, objetos terrestres y marítimos, vehículos;
· sistemas centrados en redes multiagente, sistemas de producción, informática, telecomunicaciones y otras redes ;
· sistemas de transporte y logística ;
· energía global, transporte de gas y otros sistemas de infraestructura a gran escala;
· sistemas de soporte de información para tareas de gestión y soporte para la toma de decisiones estratégicas y operativas en condiciones de información y contrarrestación incompletas.
Los problemas fundamentales de la teoría de la construcción de sistemas de control requieren su desarrollo intensivo. El desarrollo de investigaciones en esta dirección permitirá:
Desarrollo de los fundamentos teóricos para la solución del complejo problema trino de control-computación-comunicación (problema - " Control- Cálculo- Comunicación") para sistemas complejos de información y control, incluso en condiciones de restricciones en los canales de comunicación y fallas de los subsistemas;
Resolver problemas de gestión de objetos y procesos fundamentalmente nuevos relacionados con objetos en movimiento, objetos para fines especiales, sistemas tecnológicos y organizativos;
Crear métodos eficaces para el diagnóstico funcional y garantizar la tolerancia a fallos de los sistemas de control de aeronaves y otros objetos en movimiento, así como la estabilidad dinámica de los sistemas de energía eléctrica;
Mejorar la calidad, acelerar y reducir el costo del desarrollo de soluciones de diseño mediante la algoritmización y la automatización del proceso de desarrollo del sistema de control.
En adelante, el control se entiende en un sentido amplio, incluida la red de comunicación, el grupo, el control distribuido (en la literatura inglesa, control en redes, control sobre redes, control distribuido, etc.)