هدف کنترل سیستم های کنترل هوشمند. مفاهیم: سیستم هوشمند (IntS)، سیستم کنترل هوشمند (IntSU). نیاز به کنترل هوشمند
این مقاله نیز موجود است:
روزنبرگ ایگور نائوموویچ
کنترل هوشمند// فن آوری های کنترل مدرن. ISSN 2226-9339
. - . شماره مقاله: 7608. تاریخ انتشار: 1396/04/29. حالت دسترسی: https://site/article/7608/معرفی
مدیریت هوشمند تعمیم مدیریت نشانه شناختی، شناختی و اطلاعاتی است. در مدیریت حمل و نقل هوشمند، حوزه های زیر متمایز می شوند: سیستم های حمل و نقل هوشمند، کنترل نشانه شناختی هوشمند و کنترل شناختی هوشمند. کنترل نشانه شناختی هوشمند با اشکال مختلف منطق، سیستمی از محصولات و الگوریتم های تکاملی مرتبط است. کنترل شناختی هوشمند به عنوان ترکیبی از کنترل رایانه انسانی با استفاده از کانال های انجمنی و تجزیه و تحلیل دانش ضمنی در نظر گرفته می شود. کنترل هوشمند به عنوان وسیله ای برای تصمیم گیری در شرایط عدم اطمینان در نظر گرفته می شود. مدیریت هوشمند اطلاعات به عنوان پشتیبان مدیریت هوشمند از طریق فناوری اطلاعات در نظر گرفته می شود.
نیاز به کنترل هوشمند
با توسعه جامعه و پیچیده تر شدن اشیا و وظایف مدیریتی، فناوری های مدیریت نیز تغییر کردند. مشکل "داده های بزرگ" در مدیریت موقعیت های پیچیده حادتر شده است. این یک مانع اطلاعاتی برای فناوری های "مدیریت سازمانی" ایجاد می کند. مشخصه مدیریت مدرن رشد اطلاعات با ساختار ضعیف است. این امر باعث انتقال به مدیریت هوشمند می شود که به نوبه خود منجر به نیاز به استفاده از فناوری های مدیریت دانش می شود. اساس مدیریت هوشمند سیستم های هوشمند و فناوری های هوشمند است. سیستم هوشمند یک سیستم فنی یا نرم افزاری-سخت افزاری است که قادر به دستیابی به راه حل های خلاقانه برای مسائل مربوط به یک حوزه موضوعی خاص است که دانش مربوط به آن در حافظه چنین سیستمی ذخیره می شود. به روشی ساده، ساختار یک سیستم هوشمند شامل سه بلوک اصلی است - یک پایگاه دانش، یک حل کننده و یک رابط هوشمند. حل کننده جزء غالب سیستم هوشمند است. در منطق مرتبه اول، حل کننده مکانیزمی برای به دست آوردن راه حل برای عبارات منطقی است. در سیستم های چند عاملی که به عنوان هوش مصنوعی طبقه بندی می شوند، از مفهوم حل کننده نیز استفاده می شود. یک عامل یک حل کننده مشکل است که یک نهاد نرم افزاری است که قادر است در جهت دستیابی به اهداف تعیین شده عمل کند. در مدلسازی نمادین، s-solver مقدار تخصصی شدن پیام است. Efimov E.I یکی از اولین کسانی بود که در روسیه این مفهوم را معرفی کرد. . این فهرست کوتاه اهمیت حل کننده برای سیستم های هوشمند و فناوری های هوشمند را نشان می دهد.
کنترل هوشمند در چارچوب نشانه شناسی کاربردی
نشانه شناسی به مطالعه ماهیت، انواع و کارکردهای نشانه ها، نظام های نشانه ای و فعالیت نشانه های انسانی، جوهر نشانه زبان های طبیعی و مصنوعی با هدف ساختن نظریه ای کلی از نشانه ها می پردازد. در حوزه نشانه شناسی، گرایش «نشانه شناسی کاربردی» وجود دارد که بانی آن د.ا. پوسپلوف
در نشانه شناسی دو حوزه کاربرد نشانه ها وجود دارد: شناخت و ارتباط. این امر نشانهشناسی را به دو بخش تقسیم میکند: نشانهشناسی دانش. نشانه شناسی ارتباطات معنایی اساس کنترل هوشمند، نظام نشانه شناختی است. به گفته پوسپلوف، نظام نشانهشناختی W هشت مجموعه مرتب شده است:
W=< T, R, A, P, τ, ρ, α, π>, (1)
جایی که
T - مجموعه ای از نمادهای اساسی؛
R - مجموعه ای از قوانین نحوی؛
الف - دانش زیادی در مورد حوزه موضوعی؛
P مجموعه ای از قوانین برای استخراج راه حل ها (قوانین عملی) است.
τ - قوانین تغییر مجموعه T.
ρ - قوانینی برای تغییر مجموعه R.
α قوانینی برای تغییر مجموعه A هستند.
π - قوانینی برای تغییر مجموعه P.
دو مجموعه اول زبان سیستم W و τ و ρ تغییر آن را انجام دهد. قوانین α دانش زیادی را در مورد حوزه موضوعی تغییر دهید. اگر دانش را بدیهیات یک سیستم رسمی (که توسط چهار عنصر اول W تشکیل می شود) در نظر بگیریم، آنگاه قواعد α ، اساساً تفسیر نمادهای اساسی و بنابراین فرمول های درست ساخته شده زبان نظام نشانه شناختی W.
چهار مجموعه اول یک سیستم رسمی را تشکیل می دهند FS، عناصر پنج تا هشت قواعد تغییر سیستم رسمی را تشکیل می دهند. با انجام این کار، آنها از انطباق سیستم رسمی اطمینان حاصل می کنند، "تنظیم" آن برای حل وظایف و مشکلاتی که در چارچوب سیستم، FSقابل حل نیست
بنابراین، سیستم نشانه شناختی (1) را می توان به عنوان یک سیستم پویا ترکیبی تعریف کرد: W=
بنابراین می توان به نظام نشانه شناختی تعبیر جدیدی داد. سیستم دینامیکی مرکب: W=
قوانین MFsi = (τ، ρ، α، π), آنهایی که حالت سیستم رسمی را تغییر می دهند (شیء کنترلی) با وابستگی که در عناصر مثلث نشانه شناختی (مثلث فرگه) وجود دارد به هم متصل می شوند. این بدان معنی است که اعمال یکی از چهار قانون باعث می شود قوانین باقی مانده اعمال شوند.
این وابستگی ها پیچیده هستند، نمایش تحلیلی آنها وجود ندارد، و این مشکل است و موضوع تحقیق در مورد سیستم های نشانه شناختی هوش مصنوعی است. بنابراین، استفاده از رویکرد اطلاعاتی و مدل سازی اطلاعات ساده تر است.
توسعه سیستم های کنترل رسمی در قالب اجزای پویا MFsiویژگی های باز بودن سیستم ها را ارائه می دهد. آنها این فرصت را ایجاد می کنند تا شیء کنترلی را با تأثیرات مدیریتی و تغییر شرایط خارجی تطبیق دهند.
این به ویژه به ما امکان می دهد تا به طور قابل توجهی امکانات حمایت از تصمیم گیری را در شرایط عدم قطعیت، ناقص بودن و ناسازگاری اطلاعات اولیه گسترش دهیم.
انواع عدم قطعیت در اجرای کنترل هوشمند
روشهای کنترل سنتی، از جمله برخی از انواع کنترل هوشمند، بر این فرض استوارند که مدلهای حالت و کنترل یک شی دقیقاً رفتار آن را توصیف میکنند. روش های مبتنی بر این فرض در تئوری کنترل کلاسیک گنجانده شده است. اما در شرایط افزایش حجم، رشد اطلاعات بدون ساختار و تأثیر محیط خارجی، انحراف از این شرایط مشخص است.
تقریباً هر مدلی توصیف ساده شده یک شی واقعی، وضعیت و رفتار آن است. درجه ساده سازی ممکن است قابل قبول باشد یا عدم قطعیت ایجاد کند. در دینامیک رفتار یک شیء کنترلی، برخی از ویژگی های شیء می تواند در طول عملیات آن به طور قابل توجهی تغییر کند. همه اینها عدم قطعیت هایی را در مدل های مختلف برای توصیف یک شی ایجاد می کند و کنترل آن را دشوار می کند، از جمله کنترل فکری. مدل کنترل معمولی زیربنای الگوریتم کنترل یا مجموعه قوانین کنترل تعیین شده اسمی نامیده می شود.
در شرایط عدم قطعیت قابل توجه، روشهای کلاسیک تئوری کنترل غیرقابل اجرا هستند یا نتایج رضایتبخشی ایجاد میکنند. در این موارد استفاده از روش های خاص تحلیل و سنتز سیستم های کنترلی برای اجسام با مدل های نامشخص ضروری است. اولین قدم ارزیابی نوع و ارزش عدم قطعیت است.
انواع اصلی عدم قطعیت در مدل های مدیریتی وجود دارد: پارامتری، عملکردی، ساختاری و سیگنالینگ.
عدم قطعیت پارامتری به این معنی است که پارامترهای ثابت مدل ناشناخته هستند یا به طور دقیق تعیین نمی شوند. به عنوان مثال، به جای مقادیر نقطه، مقادیر بازه ای وجود دارد. هنگام حرکت به سمت سیستم های اندازه گیری اطلاعات، می توان در مورد عدم اطمینان اطلاعات پارامترها صحبت کرد. بنابراین، در بسیاری از موارد، مقادیر واقعی پارامترها ممکن است به طور قابل توجهی با مقادیر اسمی پذیرفته شده متفاوت باشد.
عدم قطعیت سیگنال به این معنی است که عملکرد مدیریت یا جریان اطلاعات در سیستم کنترل تحت تأثیر تداخلی قرار می گیرد که به طور قابل توجهی سیگنال های اسمی را تغییر می دهد. چنین سیگنال هایی که فرآیند کنترل را از سیگنال اسمی منحرف می کنند، اختلال یا تداخل نامیده می شوند. تفاوت این است که تداخل غیرفعال است و فقط نسبت سیگنال به نویز را تغییر می دهد. اغتشاش سیگنال را با همان تداخل تغییر می دهد.
سیستم های کنترل هوشمند مدرن باید عملکرد مستقل بسیاری از اشیاء فنی مرتبط را تضمین کنند. این زمینه را برای صحبت در مورد یک سیستم کنترل هوشمند (ICS) فراهم می کند. یک سیستم هوشمند باید مشکلات پیچیده از جمله برنامه ریزی، تعیین هدف، پیش بینی و غیره را حل کند. برای تطبیق پذیری و دقت راه حل ها، استفاده از کنترل هوشمند چند منظوره توصیه می شود.
معماری چند سطحی سیستم کنترل هوشمند از سه سطح مفهومی، اطلاعاتی و عملیاتی تشکیل شده است (شکل 1). سیستمی که با استفاده از این معماری ساخته شده است، رفتار اشیاء فنی پیچیده را در شرایط تعامل مستقل و جمعی کنترل می کند. سطح مفهومی مسئول اجرای کارکردهای فکری بالاتر است
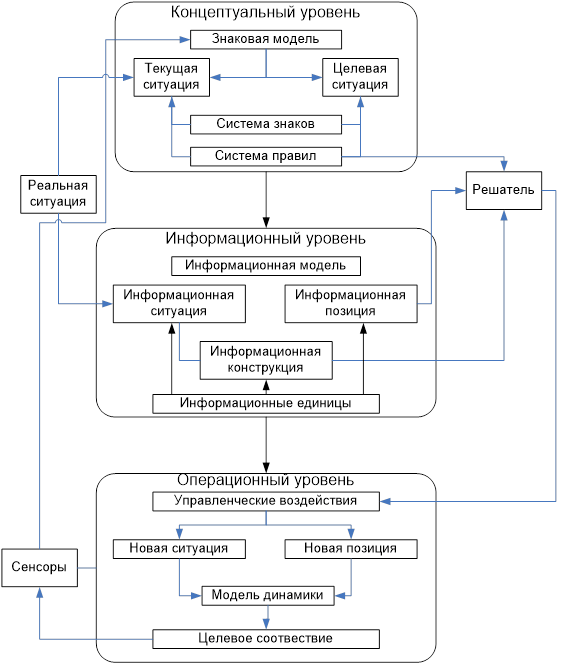
عکس. 1. کنترل هوشمند چند سطحی
در سطح مفهومی، از بازنمایی نشانهشناختی دانش استفاده میشود و پیامها با سطوح دیگر رد و بدل میشوند. سطوح اطلاعاتی و عملیاتی شامل ماژول هایی است که رویه های مختلف فکری و اطلاعاتی را پشتیبانی می کند و آنها را به مدیریت تبدیل می کند.
وظیفه اصلی مدیریت در سطح مفهومی، ذخیره، کسب و استفاده از دانش مفهومی ارائه شده به شکل نشانه شناختی (نمادین) است.
سیستم دینامیکی مرکب: W=
کسب دانش بر اساس مدلی از وضعیت واقعی در محیط خارجی است. بالاترین کارکردهای فکری شامل کارکردهای تعیین هدف اصلی و اهداف فرعی، برنامه ریزی رفتار و توزیع تأثیرات در برنامه کلی عمل است.
در سطح مدیریت اطلاعات، مشکلات مدل سازی اطلاعات حل می شود که اصلی ترین آنها عبارتند از: ساخت یک موقعیت اطلاعاتی، موقعیت اطلاعات، که با جزء مطابقت دارد. FSi. در سطح مدیریت اطلاعات، وظایف ساخت یک ساختار اطلاعاتی حل می شود که بازتابی از سیستم قوانین در سطح مفهومی است و با جزء مطابقت دارد. Mfsi. محیط زبانی کنترل نشانه شناختی در سطح اطلاعات با استفاده از واحدهای اطلاعاتی مختلف تحقق می یابد. که به عنوان مبنایی برای ایجاد موقعیت اطلاعاتی، موقعیت اطلاعاتی و طراحی اطلاعات عمل می کنند.
در سطح عملیاتی (اجرایی) تصمیمات مدیریتی (تأثیرات مدیریتی) اجرا می شود. تأثیرات مدیریتی لزوماً موقعیت اطلاعات شیء کنترل را تغییر می دهد. تأثیرات مدیریت می تواند در صورت لزوم وضعیت اطلاعات شی کنترل را تغییر دهد. در عین حال، اغلب نیازی به تغییر وضعیت اطلاعات نیست. وظیفه اصلی این سطح تغییر وضعیت و موقعیت شی کنترل و گزارش تغییرات به سطح مفهومی است.
معماری چند سطحی دارای تعدادی ویژگی است. این شامل تعدادی از عملکردهای شناختی انسان است. این مبتنی بر استفاده از رویکرد اطلاعاتی برای مدیریت هوشمند است.
شایان ذکر است که تفاوت بین فناوری های فکری و اطلاعاتی وجود دارد. فن آوری های اطلاعات عملکردهای پشتیبانی از مدیریت هوشمند را انجام می دهند. نقش اصلی را فناوری های تصمیم گیری هوشمند ایفا می کنند. آنها این امکان را به همراه یک تصمیم یا در فرآیند اخذ تصمیم، جستجوی دانش جدید و انباشت منابع فکری می کنند. فناوری اطلاعات تنها منابع اطلاعاتی را ایجاد می کند. این بدان معناست که دانشی که به شکل صریح رسمیت یافته است، پس از تسلط، می تواند بخشی از تجربه و بخشی از پایگاه دانش شود و توسط آن برای حل مشکلات و تصمیم گیری استفاده شود.
نتیجه
کنترل هوشمند هنگام مدیریت اشیاء پیچیده ای که یافتن مدل های عملیاتی رسمی برای آنها دشوار یا غیرممکن است، مؤثر و ضروری است. اساس مدیریت هوشمند در وهله اول مدل های نشانه شناختی و در درجه دوم مدل های اطلاعاتی است. روش های کنترل هوشمند متنوع بوده و برای سیستم های فنی، شناختی و حمل و نقل قابل اجرا هستند. کنترل هوشمند به طور گسترده ای برای کنترل چند منظوره اعمال می شود. مدیریت هوشمند مدرن در حال ادغام در پلتفرم ها و خدمات ابری است. هنگام مدیریت سازمان ها و شرکت های توزیع شده، نیاز به در نظر گرفتن روابط فضایی و دانش فضایی وجود دارد. مشکل دیگر تعداد محدود فناوری های هوشمند برای کار با دانش ضمنی است. از نظر فنی، مشکل مدیریت دانش به تبدیل منابع اطلاعاتی به منابع فکری و کاربرد آنها در فناوری های هوشمند مربوط می شود.
کتابشناسی - فهرست کتب
- پوسپلوف D.A. نشانه شناسی کاربردی و هوش مصنوعی // محصولات و سیستم های نرم افزاری. – 1996. – شماره 3. – ج.10-13
- Tsvetkov V.Ya. کنترل شناختی مونوگراف - م.: انتشارات MAKS، 2017. - 72 ص. شابک 978-5-317-05434-2
- Tsvetkov V.Ya. مدیریت اطلاعات. - LAP LAMBERT Academic Publishing GmbH & Co. KG، Saarbrücken، آلمان 2012 -201с
- اوسیپوف G.S. از مدیریت موقعیتی تا نشانه شناسی کاربردی. اخبار هوش مصنوعی 2002، شماره 6.
- Nikiforov V. O.، Slita O. V.، Ushakov A. V. کنترل هوشمند در شرایط عدم اطمینان. - سن پترزبورگ: دانشگاه ایالتی سن پترزبورگ ITMO، 2011.
- McAfee A., Brynjolfsson E. داده های بزرگ: انقلاب مدیریت // بررسی کسب و کار هاروارد. – 2012. – شماره. 90. – صص 60-6، 68، 128.
- Tsvetkov V.Ya. Markelov V.M.، Romanov I.A. غلبه بر موانع اطلاعاتی // آموزش از راه دور و مجازی. 1391. شماره 11. ص 4-7.
- Forbes L. S.، Kaiser G. W. انتخاب زیستگاه در پرورش پرندگان دریایی: چه زمانی باید از سد اطلاعات عبور کرد //Oikos. – 1994. – ص 377-384.
- Tsvetkov V. Ya. فناوری کنترل هوشمند // مجله جامعه شناسی روسیه، 2015، جلد. (2)، است. 2.-р.97-104. DOI: 10.13187/rjs.2015.2.97 www.ejournal32.com.
- زیلوچیان ع.، جمشیدی محمد. سیستمهای کنترل هوشمند با استفاده از روشهای محاسبات نرم. – CRC Press, Inc., 2000
- علوی م.، لایدنر دی. ای. بررسی: مدیریت دانش و سیستم های مدیریت دانش: مبانی مفهومی و مسائل پژوهشی //فصلنامه MIS. – 1380. – ص107-136.
- پوسپلوف D.A. مدلسازی استدلال تجربه در تجزیه و تحلیل اعمال ذهنی. - م.: رادیو و ارتباطات، 1989. -184c.
- De Moura L., Bjørner N. Z3: یک حل کننده SMT کارآمد //ابزارها و الگوریتمها برای ساخت و تحلیل سیستمها. – Springer Berlin Heidelberg, 2008. – ص 337-340.
- روزنبرگ I.N., Tsvetkov V.Ya. کاربرد سیستم های چند عاملی در سیستم های لجستیک هوشمند. // مجله بین المللی آموزش تجربی. – 2012. – شماره 6. – ص 107-109
- Efimov E.I. حل المسائل فکری - م.: ناوکا، تحریریه اصلی ادبیات فیزیکی و ریاضی، 1982. - 320 ص.
- Pospelov D.A.، Osipov G.S. نشانه شناسی کاربردی // اخبار هوش مصنوعی. - 1999. - شماره 1.
- Tsvetkov V.Ya. عدم قطعیت و قطعیت اطلاعات در علوم اطلاعات // فناوری اطلاعات. - 2015. - شماره 1. -ص.3-7
- Tsvetkov V. Ya. ارزیابی دوگانه موقعیت های اطلاعاتی و برتری اطلاعات // محقق اروپایی. سری A. 2014، جلد (86)، شماره 11-1، pp.1901-1909. DOI: 10.13187/er.2014.86.1901
- Tsvetkov V. Ya. وضعیت اطلاعات و موقعیت اطلاعات به عنوان ابزار مدیریت // محقق اروپایی. سری A. 2012، ج.(36)، 12-1، ص2166- 2170
- Tsvetkov V. Ya. ساخت و ساز اطلاعات // مجله اروپایی فناوری و طراحی. -1393، ج (5)، شماره 3. - ص147-152
- 22. Pospelov D.A. مدل های نشانه شناختی: موفقیت ها و چشم اندازها // سایبرنتیک. – 1976. – شماره 6. – ص 114-123.
- 23. Pospelov D.A. مدل های نشانه شناختی در مدیریت سایبرنتیک. مسائل عملی - M.: Nauka، 1984. - P.70-87
- Osipov G.S. و همکاران کنترل هوشمند وسایل نقلیه: استانداردها، پروژه ها، اجراها // ابزار دقیق هوافضا. – 2009. – شماره. 6. – صص 34-43.
- Snytyuk V. E.، Yurchenko K. N. مدیریت هوشمند ارزیابی دانش // VE Snytyuk، KN Yurchenko. - Cherkassy. – 2013.
- پوگاچف I. N.، Markelov G. Ya. مدیریت هوشمند سیستم های حمل و نقل شهری // حمل و نقل و خدمات: مجموعه. علمی آثار.–کالینینگراد: انتشاراتی به نام I. Kant. – 2014. – شماره. 2. – صص 58-66.
- Atiencia V., Diveev A.I. سنتز یک سیستم کنترل هوشمند چند منظوره //مشکلات مدرن علم و آموزش. – 2012. – شماره. 6.
- Gribova V.V. و همکاران پلت فرم ابری برای توسعه و مدیریت سیستم های هوشمند // کنفرانس بین المللی علمی و فنی "فناوری های معنایی باز برای طراحی سیستم های هوشمند" (OSTIS-2011).-Minsk: BSUIR. – 2011. – ص 5-14.
موضوع 13. سیستم های کنترل هوشمند
نسل جدیدی از سیستمها - سیستمهای هوشمند (IS) - اصول دیگری را برای سازماندهی اجزای سیستم به وجود آورده است؛ مفاهیم، اصطلاحات و بلوکهای جدیدی ظاهر شدهاند که قبلاً در پیشرفتها و بنابراین در ادبیات علمی با آنها مواجه نشده بود.
سیستم های هوشمند قادر به ترکیب یک هدف، تصمیم گیری برای اقدام، ارائه اقدام برای رسیدن به هدف، پیش بینی مقادیر پارامترهای نتیجه عمل و مقایسه آنها با واقعی، تشکیل بازخورد، تنظیم هدف یا کنترل
شکل 13.1 بلوک دیاگرام IS را نشان می دهد که در آن دو بلوک بزرگ سیستم برجسته شده است: ترکیب هدف و اجرای آن.
در بلوک اول بر اساس ارزیابی فعال اطلاعات دریافتی از سیستم حسگر، در صورت وجود انگیزه و دانش، هدفی سنتز شده و تصمیم به اقدام گرفته می شود. ارزیابی فعال اطلاعات تحت تأثیر سیگنال های ماشه انجام می شود. متغیر بودن محیط و وضعیت خود سیستم می تواند منجر به نیاز به چیزی (انگیزه) شود و اگر دانش در دسترس باشد، می توان یک هدف را سنتز کرد.
هدف به عنوان یک پیش بینی ایده آل و ذهنی از نتیجه یک فعالیت درک می شود. با ادامه ارزیابی فعالانه اطلاعات در مورد محیط و وضعیت خود سیستم، از جمله شی کنترل، هنگام مقایسه گزینه های دستیابی به هدف، می توانید تصمیمی برای اقدام بگیرید.
علاوه بر این، در بلوک دوم، یک سیستم خبره پویا (DES)، بر اساس اطلاعات فعلی در مورد محیط و وضعیت خود IS، در حضور یک هدف و دانش، ارزیابی کارشناسی انجام میدهد و در مورد مدیریت تصمیم میگیرد. ، نتایج عمل را پیش بینی می کند و مدیریت را توسعه می دهد.
کنترل ارائه شده به صورت کدگذاری شده به یک سیگنال فیزیکی تبدیل شده و به محرک ها ارسال می شود.
شیء کنترلی با دریافت سیگنال از محرک ها، اقدامی را انجام می دهد که نتایج آن در قالب پارامترها ارائه شده است و از طریق مدار بازخورد 2 به نیروگاه دیزل ارسال می شود و در آنجا با موارد پیش بینی شده مقایسه می شود. . در عین حال، پارامترهای نتیجه عمل که مطابق با ویژگی های هدف تفسیر شده و وارد بلوک I می شود، می تواند برای ارزیابی احساسی نتیجه به دست آمده استفاده شود: به عنوان مثال، هدف به دست آمده است، اما نتیجه مورد پسند نیست
اگر هدف از همه جهات محقق شود، مدیریت تقویت می شود. در غیر این صورت، تصحیح کنترل رخ می دهد. وقتی هدف دست نیافتنی باشد، هدف تعدیل می شود.
لازم به ذکر است که با تغییرات ناگهانی در وضعیت محیط یا شیء کنترلی یا سیستم به طور کلی، می توان یک هدف جدید را ترکیب کرد و دستیابی به آن را سازماندهی کرد.
ساختار IS، همراه با عناصر جدید، شامل عناصر و ارتباطات سنتی است؛ یک سیستم خبره پویا، جایگاه مرکزی را در آن اشغال میکند.
بلوک 1 - سنتز هدف بلوک II - اجرای هدف
شکل 13.1 - بلوک دیاگرام آی سی
به طور رسمی، IS با شش عبارت زیر توصیف می شود:
تی ایکس اس م تی ;
تی م اس ST ;
سی تی اس آر T;
تی ایکس= (الف T) X T+(B T) U T;
تی Y = (D T) X T;
تی آر Y با تی ,
که در آن T مجموعه ای از لحظات در زمان است.
X، S، M، C، R و Y - مجموعه ای از حالات سیستم، محیط، انگیزه، هدف، پیش بینی شده و نتیجه واقعی.
A، B و D - ماتریس های پارامتر.
اپراتورهای تبدیل هوشمند با استفاده از دانش
این توصیف نمایشهایی از اشیاء سیستم را در قالب مجموعهای از مقادیر، یا مجموعهای از عبارات یا برخی اشکال دیگر ترکیب میکند.
خصوصیات دینامیکی یک IS را می توان در فضای حالت توصیف کرد. اپراتورهای فکری که ادراک، بازنمایی، شکلگیری مفهوم، قضاوتها و استنتاجها را در فرآیند شناخت پیادهسازی میکنند، ابزار رسمی پردازش اطلاعات و دانش و همچنین تصمیمگیری هستند. همه این جنبه ها باید مبنایی برای ساخت DES باشد که در زمان واقعی و دنیای واقعی کار می کند.
یک سیستم خبره پویا موجودیت پیچیده ای است که قادر به ارزیابی وضعیت سیستم و محیط، مقایسه پارامترهای نتایج مطلوب و واقعی یک اقدام، تصمیم گیری و توسعه مدیریتی است که به دستیابی به هدف کمک می کند. برای انجام این کار، DES باید دارای دانش و روش هایی برای حل مشکلات باشد. دانش انتقال یافته به سیستم خبره را می توان به سه دسته تقسیم کرد:
1) دانش مفهومی (در سطح مفاهیم) دانشی است که در کلمات گفتار انسان یا به طور خاص در اصطلاحات علمی و فنی و طبیعتاً در طبقات و ویژگی های اشیاء محیطی در پشت این اصطلاحات تجسم یافته است. این همچنین شامل پیوندها، روابط و وابستگی های بین مفاهیم و ویژگی های آنها، ارتباطات انتزاعی نیز در کلمات و اصطلاحات بیان شده است. دانش مفهومی حوزه عمدتاً علوم بنیادی است، با توجه به اینکه این مفهوم بالاترین محصول بالاترین محصول ماده - مغز است.
2) دانش واقعی، موضوعی مجموعه ای از اطلاعات در مورد ویژگی های کیفی و کمی اشیاء خاص است. با این دسته از دانش است که اصطلاحات "اطلاعات" و "داده" در ارتباط هستند، اگرچه این استفاده از این اصطلاحات تا حدودی معنای آنها را کمرنگ می کند. هر دانشی حامل اطلاعات است و می تواند در قالب داده نمایش داده شود. دانش واقعی همان چیزی است که ماشینهای محاسباتی همیشه با آن سروکار داشتهاند و هنوز هم بیشتر از همه با آن سروکار دارند. شکل مدرن انباشت داده ها معمولاً پایگاه داده نامیده می شود. البته برای سازماندهی پایگاههای اطلاعاتی و جستجوی اطلاعات لازم در آنها باید بر دانش مفهومی تکیه کرد;
3) دانش الگوریتمی، رویه ای - این همان چیزی است که معمولاً کلمات "مهارت"، "فناوری" و غیره نامیده می شود. در محاسبات، دانش الگوریتمی در قالب الگوریتم ها، برنامه ها و زیر روال ها پیاده سازی می شود، اما نه همه آنها، بلکه آن ها که می تواند از دست در دست منتقل شود و بدون مشارکت نویسندگان مورد استفاده قرار گیرد. این پیاده سازی دانش الگوریتمی محصول نرم افزاری نامیده می شود. رایجترین اشکال محصولات نرمافزاری، بستههای نرمافزار کاربردی، سیستمهای نرمافزاری و سایر مواردی هستند که بر حوزه خاصی از کاربرد DES متمرکز شدهاند. سازماندهی و استفاده از بسته های نرم افزار کاربردی مبتنی بر دانش مفهومی است.
واضح است که دانش مفهومی مقوله بالاتر و تعیین کننده دانش است، اگرچه از منظر عملی، مقولات دیگر ممکن است مهمتر به نظر برسند.
احتمالاً به همین دلیل است که دانش مفهومی به ندرت به شکلی تجسم مییابد که بتواند توسط رایانهها پردازش شود. و اگر مجسم باشد، اغلب ناقص و یک طرفه است. در بیشتر موارد، شخص حامل دانش مفهومی باقی می ماند. این امر اتوماسیون بسیاری از فرآیندها را کند می کند.
بازنمایی دانش مفهومی، یا به طور دقیق تر، سیستم هایی که هر سه دسته دانش را اجرا می کنند، اما دانش مفهومی را برجسته می کنند و بر اساس استفاده فشرده از آن کار می کنند، پایگاه های دانش نامیده می شوند.
ایجاد و استفاده گسترده از پایگاه های دانش در سیستم های اطلاعاتی یکی از مهم ترین وظایف است. بخش مفهومی پایگاه دانش را مدل دامنه، بخش الگوریتمی را سیستم نرم افزاری و بخش واقعی را پایگاه داده می نامیم.
عملکرد بعدی DES حل مسئله است. یک مشکل تنها در صورتی می تواند توسط یک ماشین حل شود که به طور رسمی مطرح شود - اگر مشخصات رسمی برای آن نوشته شده باشد. دومی باید بر پایه دانش تکیه کند. مدل دامنه، محیط کلی را که در آن کار ایجاد شده است، و مشخصات، محتوای کار را توصیف می کند. در مجموع، آنها این امکان را ایجاد می کنند که کدام پیوندها و وابستگی های انتزاعی، در چه ترکیبی و در چه ترتیبی باید برای حل مشکل استفاده شوند.
برنامه های کاربردی ابزارهای خاصی را در پشت این وابستگی ها ارائه می دهند و همچنین حاوی الگوریتم هایی برای حل معادلات حاصل می باشند. در نهایت، پایگاه داده تمام یا بخشی از داده های ورودی را برای اجرای این الگوریتم ها تامین می کند؛ داده های از دست رفته باید در مشخصات موجود باشد.
این سه بخش از پایگاه دانش با سه مرحله حل مسئله مطابقت دارد:
1) ساخت یک برنامه راه حل انتزاعی (شامل ظهور مشکل، فرمول و مشخصات آن)؛
2) ترجمه مسئله به زبان ماشین مناسب؛
3) پخش و اجرای برنامه.
ساخت یک برنامه انتزاعی با نمایش و پردازش دانش مفهومی در یک سیستم اطلاعاتی مرتبط است و طبق تعریف، ویژگی هوش مصنوعی است.
هوش مصنوعی با پردازش متون، پیام های شفاهی به زبان طبیعی، با تجزیه و تحلیل و پردازش اطلاعات (شناخت انواع تصاویر، اثبات قضایا، استنتاج منطقی و غیره) همراه است.
عملکردهای DES همچنین ارزیابی نتایج حل یک مسئله، تشکیل پارامترها برای نتیجه آینده یک اقدام، تصمیم گیری در مورد مدیریت، توسعه مدیریت و مقایسه پارامترهای نتایج مطلوب و واقعی است. این شامل فرآیندهای مدل سازی برای ارزیابی پیامدهای احتمالی و صحت حل مسئله است.
توجه داشته باشید که در موارد واقعی در توصیف اشیاء مورد مطالعه مشکل وجود دارد. چنین توصیفی به درستی بخشی از مشخصات کار در نظر گرفته نمی شود، زیرا، به عنوان یک قاعده، وظایف زیادی در مورد یک شی مطرح می شود، که طبیعتاً باید هنگام تشکیل یک پایگاه دانش در نظر گرفته شود. علاوه بر این، ممکن است معلوم شود که مشکل به وجود آمده به طور کامل به طور خودکار قابل حل نیست، به عنوان مثال، به دلیل ناقص بودن مشخصات یا شرح شی.
بنابراین، در IS توصیه می شود در مراحل خاصی یک حالت تعاملی کار با DES داشته باشید. باید به خاطر داشته باشیم که مدل دامنه وضعیت کلی (دانش) را توصیف می کند و مشخصات محتوای کار را توصیف می کند. مشکلات بسیار مهم ایجاد یک محیط نرم افزاری یکپارچه و ترکیب الگوریتم ها به طور مستقیم بر اساس بیان مسئله است.
بسته به هدفی که IS با آن روبرو است، پایگاه دانش، الگوریتمهای حل مسئله، تصمیمگیری و توسعه کنترل میتواند به طور طبیعی بازنمایی متفاوتی داشته باشد که به نوبه خود به ماهیت حل مسئله بستگی دارد. بر این اساس سه نوع DES قابل مشاهده است. ساختار DES نوع اول در شکل 13.2 نشان داده شده است.

شکل 13.2 - ساختار DES از نوع اول
در اینجا فرض بر این است که دانش مفهومی و واقعی به طور دقیق فرآیندها و اطلاعات مربوط به یک حوزه موضوعی خاص را منعکس می کند.
سپس راه حل مشکل پیش آمده در این زمینه بر اساس روش های ریاضی دقیق، مطابق با فرمول و مشخصات به دست می آید. نتایج حاصل از مطالعه تصمیم گیری و پیش بینی برای به دست آوردن ارزیابی کارشناسی و تصمیم گیری در مورد نیاز به مدیریت استفاده می شود. سپس بر اساس یک الگوریتم کنترلی مناسب موجود در پایگاه دانش، اقدام کنترلی تولید میشود.
اثربخشی و ثبات این تاثیر، قبل از رسیدن به شیء کنترلی، با استفاده از یک مدل شبیهسازی ریاضی ارزیابی میشود. ارزیابی باید سریعتر از فرآیندهای واقعی در IS انجام شود.
با این حال، DES که تصمیمگیری را پیادهسازی میکند، سیستمهای نرمافزاری پیچیدهای هستند که برای تصمیمگیری خودکار یا کمک به تصمیمگیرندگان طراحی شدهاند، و در مدیریت عملیاتی سیستمها و فرآیندهای پیچیده، معمولاً تحت محدودیتهای زمانی دقیق کار میکنند.
برخلاف DES نوع اول که برای یافتن راهحل بهینه و بر اساس روشهای دقیق ریاضی و مدلهای بهینهسازی طراحی شدهاند، DES نوع دوم عمدتاً بر حل مشکلات رسمیسازی دشوار در غیاب اطلاعات کامل و قابل اعتماد متمرکز هستند (شکل 13.3). . در اینجا، از مدل های خبره استفاده می شود که بر اساس دانش متخصصان - متخصصان در یک منطقه مشکل معین، و روش های اکتشافی برای یافتن راه حل ساخته شده اند.
یکی از مشکلات اصلی هنگام طراحی یک DES از نوع دوم، انتخاب یک دستگاه رسمی برای توصیف فرآیندهای تصمیم گیری و ایجاد یک مدل تصمیم گیری بر اساس آن است که برای منطقه مشکل (از نظر معنایی صحیح) مناسب باشد. معمولاً از سیستم های تولید به عنوان چنین وسیله ای استفاده می شود. با این حال، تحقیق اصلی در چارچوب یک تفسیر الگوریتمی (جبری) از سیستم تولید با طرح متوالی ذاتی آن برای یافتن راهحل انجام میشود.
مدلهای بهدستآمده اغلب برای حوزههای مشکل واقعی که با عدم جبر در فرآیند یافتن راهحل مشخص میشوند، کافی نیستند. راه برون رفت از این وضعیت موازی سازی در جستجو است.
در واقع، باید بر ترکیب DES نوع اول و دوم در یک DES محاسبه-منطقی از نوع سوم تمرکز کرد، که در آن پایگاه دانش توصیفی را در قالب فرمول های دقیق ریاضی با اطلاعات تخصصی و همچنین، بر این اساس، ریاضی ترکیب می کند. روشهای یافتن راهحل با روشهای اکتشافی غیر دقیق، با وزن یکی یا دیگری مؤلفه با امکان توصیف مناسب حوزه موضوعی و روش یافتن راهحل تعیین میشود (شکل 13.4).

شکل 13.3 - ساختار نیروگاه دیزل سطح دوم
هنگام توسعه DES، مشکلات زیر ایجاد می شود:
1. تعیین ترکیب پایگاه دانش و تشکیل آن.
2. توسعه جدید و استفاده از نظریه ها و روش های شناخته شده برای توصیف فرآیندهای اطلاعاتی در سیستم های اطلاعاتی.
3. توسعه راه هایی برای ارائه و سازماندهی استفاده از دانش.
4. توسعه الگوریتم ها و نرم افزار با موازی سازی و استفاده از "منطق انعطاف پذیر".
- یافتن محیط های محاسباتی مناسب برای پیاده سازی الگوریتم های موازی در تشکیل DES.

شکل 13.4 - ساختار نیروگاه دیزل سطح سوم
همراه با موارد فوق، ذکر این نکته ضروری است که DES باید توانایی انطباق با یک منطقه مشکل پویا، توانایی وارد کردن عناصر و ارتباطات جدید در توصیف موقعیتها، تغییر قوانین و استراتژیهای عملکرد اشیاء را داشته باشد. فرآیند تصمیم گیری و توسعه مدیریت، کار با اطلاعات ناقص، نامشخص و متناقض و غیره.
سیستمهای خبره پویا بهعنوان بخشی از ISهایی عمل میکنند که بازخورد دارند، و بنابراین اطمینان از عملکرد پایدار چنین ISها مهم است.
از دیدگاه سنتی، میتوان فرض کرد که مدت زمان واکنش نیروگاه دیزل به تأثیرات ورودی، یعنی. زمان صرف شده برای پردازش اطلاعات ورودی و توسعه یک اقدام کنترلی یک تاخیر محض است. بر اساس تجزیه و تحلیل فرکانس، می توان تغییر در خواص فاز سیستم را ارزیابی کرد و در نتیجه حاشیه پایداری را تعیین کرد. در صورت لزوم، می توانید سیستم را با استفاده از فیلترها اصلاح کنید.
با این حال، از دیدگاه تئوری کنترل کلاسیک، IS ها سیستم های چند شی و چند متصل هستند که تجزیه و تحلیل پایداری آنها با استفاده از روش های مرسوم بسیار دشوار است.
در حال حاضر، تئوری کنترل قوی (-نظریه کنترل، -کنترل) یکی از شاخه های به شدت در حال توسعه نظریه کنترل است. نسبتاً جوان (اولین آثار در اوایل دهه 80 ظاهر شدند)، از مشکلات عملی فشرده سنتز سیستم های کنترل خطی چند بعدی که تحت شرایط انواع مختلف اختلالات و تغییرات در پارامترها کار می کردند، ناشی شد.
شما می توانید به مشکل طراحی کنترل یک شی پیچیده واقعی که در شرایط عدم قطعیت عمل می کند به روشی متفاوت برخورد کنید: سعی نکنید از یک نوع کنترل - تطبیقی یا قوی استفاده کنید. بدیهی است که باید نوع متناسب با وضعیت محیط و سیستم را انتخاب کرد که از اطلاعات موجود در سیستم تعیین می شود. اگر در حین کار سیستم، امکان سازماندهی دریافت اطلاعات وجود داشته باشد، توصیه می شود از آن در فرآیند مدیریت استفاده شود.
اما تا همین اواخر، اجرای چنین کنترل ترکیبی با مشکلات غیرقابل حلی در تعیین الگوریتم انتخاب نوع کنترل مواجه بود. پیشرفت به دست آمده در توسعه مسائل هوش مصنوعی، سنتز چنین الگوریتمی را ممکن می سازد.
در واقع، اجازه دهید این وظیفه را تعیین کنیم: سیستمی طراحی کنیم که از کنترل تطبیقی و قوی استفاده کند و نوع کنترل را بر اساس روشهای هوش مصنوعی انتخاب کند. برای انجام این کار، ویژگی های هر دو نوع را در نظر خواهیم گرفت و با در نظر گرفتن ویژگی های خاص آنها، نحوه ساخت یک سیستم کنترل ترکیبی را تعیین خواهیم کرد.
یکی از مفاهیم اصلی در نظریه کنترل قوی، مفهوم عدم قطعیت است. عدم قطعیت شی نشان دهنده عدم دقت مدل شی، چه پارامتری و چه ساختاری است.
اجازه دهید اشکال تعیین عدم قطعیت در تئوری کنترل قوی با استفاده از یک سیستم ساده - با یک ورودی و یک خروجی را با جزئیات بیشتری در نظر بگیریم (شکل 13.5).
سیگنال ها تفسیر زیر را دارند: r - سیگنال ورودی اصلی. u - سیگنال ورودی (ورودی) شی. د - اختلال خارجی؛ y سیگنال خروجی (خروجی) شی مورد اندازه گیری است.

شکل 13.5 – سیستم با یک ورودی و یک خروجی
در تئوری کنترل، عدم قطعیت به راحتی در حوزه فرکانس مشخص می شود. فرض کنیم تابع انتقال یک شیء معمولی P است، و یک جسم آشفته را در نظر بگیریم که تابع انتقال آن است.
|
|
که در آن W یک تابع انتقال ثابت است (تابع وزن).
- تابع انتقال پایدار دلخواه که نابرابری را برآورده می کند.
ما چنین اختلالی را قابل قبول می نامیم. در زیر چند گزینه برای مدل های عدم قطعیت آورده شده است:
| (1+W)P; P+W; P/(1+WP); P/(1+W). |
برای مقادیر و W در هر مورد باید مفروضات مناسبی انجام شود.
عدم قطعیت سیگنال های ورودی d منعکس کننده ماهیت متفاوت اختلالات خارجی است که بر روی شی و کنترل کننده اعمال می شود. بنابراین یک شی نامعین را می توان به عنوان مجموعه ای از اشیاء در نظر گرفت.
اجازه دهید ویژگی خاصی از سیستم های بازخورد را انتخاب کنیم، برای مثال ثبات. اگر هر یک از مجموعه اشیایی که با عدم قطعیت تعریف شده اند، کنترل کننده C نسبت به این مشخصه قوی است.
بنابراین، مفهوم استحکام مستلزم وجود یک تنظیم کننده، مجموعه ای از اشیاء و تثبیت یک ویژگی خاص از سیستم است.
در این کار ما به کل مجموعه مسائل حل شده در چارچوب تئوری کنترل نخواهیم پرداخت. اجازه دهید فقط به مشکل حساسیت حداقل بپردازیم: ساخت یک کنترل کننده C که یک سیستم بسته را تثبیت می کند و تأثیر اغتشاشات خارجی بر خروجی y را به حداقل می رساند، به عبارت دیگر، هنجار ماتریس توابع انتقال را از اغتشاشات خارجی به خروجی y به حداقل می رساند. .
یکی از ویژگیهای حل این مشکل و در واقع کل مجموعه مشکلات کنترل قوی، این واقعیت است که از قبل، در فرآیند طراحی کنترلکننده، محدودیتهایی را بر روی تأثیرات ورودی و عدم قطعیت جسم در شکل تعیین میکنیم. از نابرابری ها
در طول عملیات یک سیستم قوی، اطلاعات مربوط به عدم قطعیت در سیستم برای کنترل استفاده نمی شود.
به طور طبیعی، این منجر به این واقعیت می شود که سیستم های قوی محافظه کار هستند و کیفیت فرآیندهای گذرا گاهی اوقات توسعه دهندگان این سیستم ها را راضی نمی کند.
مانند یک سیستم کنترل تطبیقی قوی، برای اشیایی ساخته شده است که اطلاعات مربوط به آنها یا در مورد تأثیرات آنها در ابتدای کار سیستم در دسترس نیست. اغلب، ویژگی انطباق از طریق تشکیل، به طور صریح یا ضمنی، یک مدل ریاضی از یک شی یا تأثیر ورودی به دست می آید.
این امر هم کنترل تطبیقی جستجو را که مبتنی بر جستجو و حفظ حداکثر شاخص کیفیت کنترل است و هم غیرجستجو که بر اساس جبران انحراف تغییرات واقعی در مختصات کنترل شده از تغییرات مورد نظر مربوط به سطح مورد نیاز شاخص کیفیت در مرحله بعد، با توجه به مدل تصفیه شده، کنترل کننده تطبیقی تنظیم می شود.
بنابراین، ویژگی اصلی سیستم های کنترل تطبیقی، توانایی به دست آوردن اطلاعات در حین کار و استفاده از این اطلاعات برای کنترل است.
علاوه بر این، سیستم های تطبیقی همیشه از اطلاعات پیشینی در مورد عدم قطعیت در سیستم استفاده می کنند. این تفاوت اساسی بین رویکرد تطبیقی و رویکرد قوی است.
بیایید ساده ترین سیستم کنترل تطبیقی را در نظر بگیریم که ردیابی سیگنال ورودی را در حضور نویز در ورودی شی فراهم می کند (شکل 13.6).

طراحی. 13.6–سیستم کنترل تطبیقی
تفاوت رسمی با مدار در شکل 13.5 بلوک تطبیقی A است که بر اساس سیگنال خروجی شی و سیگنال مشخص کننده کیفیت داده شده، سیگنالی برای تنظیم ضرایب کنترل کننده تطبیقی تولید می کند.
با در نظر گرفتن معایب هر یک از تنظیم کننده ها، توصیه می شود سعی کنید از مزایای آنها با پیشنهاد یک طرح ترکیبی برای کنترل شی استفاده کنید. یک سیستم تطبیقی با استفاده از یک بلوک سازگاری، اطلاعاتی را در مورد وضعیت محیط خارجی تولید می کند. به ویژه، در مورد مورد بررسی، امکان به دست آوردن اطلاعات در مورد اختلال خارجی d. الگوریتم کنترل C a مطابق با وضعیت فعلی محیط خارجی مطابق با معیار تعیین شده در بلوک سازگاری است. اما سیستم تطبیقی مستلزم آن است که سیگنال ورودی r دارای محدوده فرکانسی نسبتاً وسیعی باشد و محدودیتهای شدیدی را بر مقدار و طیف فرکانس سیگنال اغتشاش خارجی d اعمال کند. بنابراین، سیستم های تطبیقی می توانند تنها در محدوده های باریک سیگنال ورودی r و اختلال خارجی d عمل کنند. خارج از این محدوده ها، سیستم تطبیقی کیفیت کنترل ضعیفی دارد و حتی ممکن است پایداری خود را از دست بدهد.
ویژگی های کنترل قوی و تطبیقی که در بالا مورد بحث قرار گرفت منجر به این نتیجه می شود که در طول عملکرد سیستم، در برخی موارد استفاده از کنترل قوی مفید است، در موارد دیگر - تطبیقی، به عنوان مثال. قادر به ترکیب کنترل بسته به وضعیت محیط خارجی باشد.
کنترل ترکیبی سوال اصلی هنگام طراحی سیستم های کنترل ترکیبی این است که چگونه، بر اساس چه دانش (اطلاعاتی) یک نوع کنترل را انتخاب کنیم.
بیشترین فرصت ها برای این کار توسط روش های هوش مصنوعی فراهم می شود. مزیت آنها نسبت به الگوریتم های سوئیچینگ ساده، استفاده از طیف وسیعی از داده ها و دانش برای تشکیل الگوریتمی برای انتخاب نوع کنترل است.
اگر مدارهای نشان داده شده در شکل های 13.5، 13.6 را به طور رسمی ترکیب کنیم، یک مدار کنترل ترکیبی به دست می آوریم (شکل 13.7).
همانطور که از شکل مشاهده می شود، سیگنال کنترل باید از یک کنترلر قوی به یک کنترل کننده تطبیقی و بالعکس تغییر کند - همانطور که محیط در طول عملکرد سیستم تغییر می کند. با استفاده از روش های تئوری سیستم های هوشمند، می توان بسته به شرایط عملیاتی سیستم، از یک نوع کنترل به نوع دیگر اطمینان حاصل کرد.
|
|

شکل 13.6 - طرح کنترل ترکیبی
بیایید ابتدا در نظر بگیریم که از چه اطلاعاتی می توان برای راه اندازی واحد هوشمند سیستم استفاده کرد. همانطور که مشخص است، سیستم های دارای یک ورودی و یک خروجی به خوبی در حوزه فرکانس توصیف می شوند. بنابراین، استفاده از ویژگی های فرکانس برای سازماندهی فرآیند تصمیم گیری در هنگام انتخاب نوع کنترل طبیعی است.
همانطور که در بالا ذکر شد، پاسخ فرکانسی یک سیستم با کنترل قوی با بدترین ترکیب پارامترها در منطقه عدم قطعیت مطابقت دارد. بنابراین، کنترل قوی را می توان به عنوان یکی از مرزهای کنترل انتخاب شده در نظر گرفت.
محدودیت دیگر با توجه به قابلیت های سیستم مورد مطالعه (سرعت درایو، منبع تغذیه و ...) تعیین می شود. بین این دو مرز منطقه ای است که در آن استفاده از کنترل تطبیقی منطقی است.
|
|

شکل 13.7 - طرح کنترل ترکیبی
از آنجایی که الگوریتم تطبیقی به مرحله اولیه عملکرد سیستم حساس است، در این مرحله توصیه می شود از کنترل قوی استفاده شود که نسبت به میزان تغییر تداخل خارجی کاملاً غیر حساس است. اما عیب آن طولانی بودن فرآیندهای گذرا و مقادیر زیاد مجاز مختصات خروجی تحت تأثیر تداخل است.
پس از مدتی، تغییر از کنترل قوی به کنترل تطبیقی منطقی است.
کنترل تطبیقی به شما امکان می دهد تا سیگنال ورودی را در حضور اطلاعات تداخل با دقت بیشتری ردیابی کنید. کنترل تطبیقی به غنای طیف سیگنال ورودی نیاز دارد و به عنوان مثال، با تغییر آهسته سیگنالها، فرآیندهای سازگاری ممکن است شکست بخورند یا تا حد زیادی کند شوند. در چنین شرایطی، لازم است دوباره به کنترل قوی تغییر دهید، که پایداری سیستم را تضمین می کند.
از موارد فوق چنین نتیجه می شود که برای عملکرد سیستم لازم است اطلاعاتی در مورد طیف فرکانس سیگنال تداخل مفید و نسبت سیگنال به نویز داشته باشید.
علاوه بر این، اطلاعات اولیه در مورد طیف فرکانسی که سیستم تطبیقی بر روی آن کار می کند، و در مورد ویژگی های خاص شی کنترل در مرزهای منطقه عدم قطعیت مورد نیاز است. از این اطلاعات می توانید یک پایگاه داده ایجاد کنید که اطلاعات مختص به هر کلاس از اشیا از قبل وارد شود. اطلاعات مربوط به طیف فرکانس سیگنال مفید، تداخل و نسبت سیگنال به نویز هنگام کار سیستم وارد پایگاه داده می شود و دائماً به روز می شود.
محتویات پایگاه داده را می توان در پایگاه دانشی که در قالب قوانین شکل می گیرد، استفاده کرد. بسته به ویژگی های خاص سیستم، می توانید سوئیچینگ را بین دو نوع کنترل تنظیم کنید. قوانین مورد نیاز در یکی از سیستم های منطقی مناسب برای مورد مورد بررسی شکل می گیرد.
با داشتن پایگاههای اطلاعاتی و دانش، میتوان مکانیزم تصمیمگیری را توسعه داد که انتخاب صحیح نوع کنترل را بسته به شرایط عملیاتی سیستم تضمین میکند.
|
|

شکل 13.8 - بلوک دیاگرام یک سیستم با یک واحد هوشمند (IB)
بخش هوشمند سیستم به طور مجزا و در بازه های زمانی مشخص عمل می کند. شکل 13.8 بلوک دیاگرام یک سیستم با یک واحد امنیت اطلاعات هوشمند را نشان می دهد که امکان انتخاب نوع کنترل را فراهم می کند.
سیگنال r و سیگنال اندازه گیری شده و خروجی شی y در ورودی بلوک دریافت می شود. در بلوک پیش پردازش اطلاعات BPOI، بر اساس ویژگی های زمانی سیگنال های r(t)، y(t)، ویژگی های فرکانس سیگنال ورودی r(w) و اختلال خارجی d(w)، موقعیت نسبی طیف r(w) و d(w) و مقادیر نسبت سیگنال به نویز مشخصه r(w)/d(w). تمام این اطلاعات وارد پایگاه داده می شود. بلوک تصمیم گیری BPR با استفاده از پایگاه دانش و داده های پایگاه داده تولید شده، تصمیمی را ایجاد می کند که مطابق با آن یکی از انواع کنترل فعال می شود. در بازه بعدی، فرآیند با استفاده از داده های جدید تکرار می شود.
UDC 004.896
I. A. Shcherbatov
کنترل هوشمند سیستم های رباتیک تحت شرایط عدم قطعیت
معرفی
کنترل هوشمند استفاده از روش های هوش مصنوعی برای کنترل اشیاء با ماهیت های فیزیکی مختلف است. در زمینه کنترل سیستم های رباتیک، روش های هوش مصنوعی بیشترین کاربرد را دارد. این پیش از هر چیز به دلیل استقلال روبات ها و نیاز آنها به حل مشکلات خلاقانه غیررسمی در شرایط ناقص اطلاعات و انواع مختلف عدم قطعیت است.
تا همین اواخر، این دسته از وظایف در انحصار هوش طبیعی باقی می ماند: اپراتور شی کنترل، مهندس، دانشمند، یعنی انسان. پیشرفت های مدرن در زمینه تئوری کنترل خودکار، روش های هوشمند برای رسمی کردن وظایف نیمه ساختار یافته و کنترل سیستم های فنی پیچیده، امکان پیاده سازی سیستم های رباتیک بسیار پیچیده را فراهم می کند که شامل پلت فرم های رباتیک متحرک، خطوط خودکار انعطاف پذیر و روبات های اندرویدی می شود.
سیستم های رباتیک تحت شرایط اطلاعات ورودی ناقص عمل می کنند، زمانی که عدم امکان اساسی اندازه گیری تعدادی از پارامترها محدودیت های قابل توجهی را بر برنامه کنترل تحمیل می کند. این امر منجر به نیاز به توسعه پایه ای از الگوریتم هایی می شود که محاسبه پارامترهای اندازه گیری نشده را بر اساس علائم غیرمستقیم و شاخص های قابل اندازه گیری ممکن می سازد.
عدم قطعیت محیط خارجی که سیستم روباتیک در آن عمل می کند، سیستم کنترل را مجبور می کند که انواع مختلفی از جبران کننده ها، ماژول هایی برای انطباق، انباشت و رتبه بندی اطلاعات را شامل شود.
فرمول بندی مسئله
هدف از این تحقیق توسعه رویکردهایی برای ساخت سیستمهای کنترل هوشمند برای سیستمهای رباتیک است که با توجه به ویژگیهای عملکرد، با در نظر گرفتن ناقص بودن اطلاعات ورودی و انواع مختلف عدم قطعیت، تغییرناپذیر هستند.
برای دستیابی به این هدف، حل تعدادی از مشکلات مرتبط ضروری است: تجزیه و تحلیل معماری سیستم های کنترل هوشمند برای سیستم های رباتیک. توسعه یک الگوریتم تعمیم یافته برای شناسایی موقعیتی یک سیستم روباتیک؛ ایجاد یک نمودار کلی از سیستم کنترل سیستم روباتیک؛ برای توسعه سیستم های کنترل هوشمند برای یک ربات هندلینگ، یک پلت فرم روباتیک متحرک و یک خط خودکار انعطاف پذیر.
روش های پژوهش
در طول تحقیق از روشهای تئوری عمومی کنترل خودکار، نظریه مجموعههای فازی، شبکههای عصبی، تحلیل سیستم و تئوری ارزیابیهای خبره استفاده شد.
محل قرارگیری سیستم رباتیک در محیط خارجی
برای پیاده سازی الگوریتم های کنترل هوشمند، وظیفه اصلی شناسایی فعلی موقعیتی است که سیستم رباتیک در آن قرار دارد. برای حل این مشکل، یک بلوک دیاگرام از سیستم شناسایی موقعیتی توسعه داده شده است (شکل 1).
واحد بینایی فنی و حسگر حسی برای تعیین تغییرات در وضعیت محیط خارجی و ارائه نقشه حسی محیط برای پردازش بیشتر طراحی شده است. نقشه حسی محیط، تصویری از موقعیتی است که ربات در لحظه فعلی در آن قرار دارد. فاصله زمانی برای ساخت یک نقشه حسی بر اساس ویژگی های منطقه موضوع انتخاب می شود.
دانش محور
اپراتور
پر فکر
رابط
مشخص کننده
الگوریتم ها
اندام های بینایی فنی و حسی
محیط خارجی
اجرایی
مکانیسم ها
برنج. 1. بلوک دیاگرام سیستم شناسایی موقعیتی
حافظه کاری، به قیاس با سیستم های خبره، برای پردازش اطلاعات دریافتی از حسگرها و پردازش با استفاده از پایگاه داده موجود از الگوریتم ها و پایگاه دانش (KB) سیستم روباتیک طراحی شده است.
اساس الگوریتم ها شامل الگوریتم هایی برای پیش پردازش نقشه حسگر (پردازش سیگنال دیجیتال، تشخیص الگوهای صدا و تصاویر)، محاسبه پارامترهای اندازه گیری نشده (وابستگی عملکردی به پارامترهای اندازه گیری شده)، بازیابی کامل بودن اطلاعات (بررسی دانش برای کامل بودن و ناسازگاری، انطباق دانش با در نظر گرفتن غیر ایستایی و شرایط خارجی متغیر)، عملیات ریاضی و غیره.
پایگاه دانش یک ساختار سلسله مراتبی پیچیده است که حاوی اطلاعات پیشینی در مورد محیط خارجی است که در مرحله آموزش گذاشته شده است، دانش کامل و ثابتی است که توسط ربات در فرآیند عملکرد و درک محیط خارجی به دست آمده است. دانش در پایگاه دانش بر اساس معیارهای مرتبط رتبه بندی شده و با در نظر گرفتن تغییرات در ویژگی های عملکرد ربات بر اساس الگوریتم های انطباق دانش به روز می شود.
مهمترین بلوک، شناسه وضعیت است. این بلوک است که مسئول تشخیص صحیح تصویر موقعیت بر اساس نقشه حسی است. اطلاعات حاصل از این بلوک برای انتخاب یک برنامه کنترل برای سیستم روباتیک تعیین کننده است.
و در نهایت رابط هوشمند که برای برقراری ارتباط با اپراتور ضروری است. اپراتور بر عملکرد سیستم رباتیک نظارت می کند و همچنین روند را برای دستیابی به اهداف تعیین شده نظارت می کند. به عنوان یک قاعده، ارتباط بین یک ربات و یک اپراتور باید با استفاده از یک رابط زبان طبیعی در یک زیر مجموعه محدود از زبان طبیعی رخ دهد.
ساختار یک سیستم کنترل سیستم رباتیک تحت شرایط عدم قطعیت
اجرای الگوریتمها و برنامهها برای کنترل هوشمند سیستمهای رباتیک در شرایط عدم قطعیت با تعدادی از مشکلات قابل توجه همراه است.
پیچیدگی الگوریتمها برای پیشپردازش اطلاعات ورودی و عدم قطعیت ساختاری مدل رفتاری سیستم رباتیک، خود افزونگی ساختار سیستم کنترل هوشمند را تعیین میکند.
برای حل مشکل کنترل یک ربات در شرایط عدم قطعیت، معماری زیر از سیستم کنترل هوشمند طراحی شد (شکل 2).
یک سیستم شناسایی موقعیتی (SIS) باید بخشی از هر سیستم کنترل هوشمند برای یک سیستم روباتیک باشد. دستگاه کنترل هوشمند (ICD) شامل یک واحد کنترل و یک واحد انتخاب برنامه کنترل (CPSU) است. هدف از این بلوک ایجاد یک عمل کنترلی برای یک سیستم درایوهای الکتریکی (ED) است که بر روی سیستم مکانیکی (MS) ربات عمل می کند.
برنج. 2. بلوک دیاگرام سیستم کنترل هوشمند برای سیستم روباتیک
سیستم های کنترل برای دستکاری های صنعتی
سیستم های کنترل سنتی برای دستکاری های صنعتی به چندین کلاس تقسیم می شوند. اولین دسته از سیستم ها، سیستم های کنترل برنامه هستند.
سیستم کنترل مداوم بدنه کار دستکاری کننده شامل تراز کردن دستکاری کننده با مدل مرجع است. در این الگوریتم کنترل، تلفات در دستکاری کننده MS در نظر گرفته نشده و فرض بر این است که تمام نیروهای ایجاد شده توسط درایوها به عنصر کار منتقل می شود.
سیستم کنترل نیروی قابل برنامه ریزی در بدنه کار برای کنترل نه تنها بردار نیرو، بلکه بردار موقعیت بدنه کار استفاده می شود. سیستم کنترل مستقل حرکت و نیرو در بدنه کار دستکاری کننده برای درجات مختلف تحرک دارای دو حلقه کنترل با بازخورد است: با موقعیت و با زور.
در سیستم کنترل کوپل شده حرکت و نیرو در بدنه کار دستکاری کننده، وظیفه بردار موقعیت بدنه کار با توجه به مقدار فعلی بردار نیرو تنظیم می شود. این بدان معنی است که وقتی بدنه کار حرکت می کند، بزرگی ضربه آن با توجه به نیروی تأثیر بر محیط خارجی تنظیم می شود.
سیستم های کنترل تطبیقی زمانی استفاده می شود که عملیات زیر انجام می شود: برداشتن یک شی به طور دلخواه واقع شده یا متحرک، جوشکاری قوس الکتریکی درزها با موقعیت متغیر، اجتناب از حرکت و موانع غیر منتظره. برای این منظور از سیستم های تطبیقی با حافظه تداعی استفاده می شود.
از سیستم های کنترل قوی نیز برای کنترل دستکاری های صنعتی استفاده می شود که در حال حاضر کاربرد عملی گسترده ای دارند.
اجرای کنترل هوشمند
مشکل عملکرد یک سیستم روباتیک در شرایط عدم قطعیت چند وجهی است.
اجازه دهید مشکل برنامه ریزی رفتار یک سیستم روباتیک را در شرایط عدم قطعیت در نظر بگیریم. برای حل این مشکل، استفاده از فناوری سیستم های خبره پویا مناسب ترین است. پایگاه دانش چنین سیستم خبره ای در طول زمان تنظیم می شود. اگر از یک پایه قوانین تولید استفاده شود، ترکیب قوانین تولید به طور مداوم از نظر کامل بودن و سازگاری بررسی می شود. علاوه بر این، با توجه به الگوریتم های تطبیق، قوانین قدیمی و قدیمی به روز و جایگزین می شوند. در عین حال توجه ویژه ای به مسائل تربیت یک سیستم خبره بدون معلم (خودآموزی) می شود، زیرا نظارت بر سیستم توسط متخصص بسیار ماهر از نظر اقتصادی امکان پذیر نیست.
بلوک خودآموز یا خود تنظیم پایگاه دانش سیستم خبره نیاز به مطالعه دقیق در مرحله طراحی سیستم کنترل هوشمند سیستم رباتیک دارد.
من اثربخشی حل مشکل اغلب به کیفیت اجرای این مرحله از کار طراحی بستگی دارد. باید شامل زیرسیستم هایی برای ارزیابی کامل بودن و ناسازگاری دانش، ارزیابی کیفیت مدیریت و تصحیح دانش باشد.
از نظر زمانی، مرحله بعدی پس از برنامه ریزی رفتار ممکن است مشکل صدور دستورات کنترلی به یک سیستم روباتیک به زبان طبیعی باشد. برای ایجاد یک رابط زبان طبیعی، به نظر ما، مناسب ترین ابزار پیاده سازی، تئوری مجموعه های فازی است.
با کمک متغیرهای زبانی حاوی یک مجموعه اصطلاحی از پیش توصیف شده، توصیفی از حوزه موضوعی، سیستم محدودی از دستورات و اشیاء که بر سیستم روباتیک تأثیر میگذارند و تحت تأثیر آن تغییر میکنند، ساخته میشود. روشهای فازیسازی و بیفاصلهسازی مورد استفاده در این مورد و همچنین الگوریتمهای استنتاج منطقی فازی، تأثیر بسزایی در دقت اقدامات کنترلی و سرعت عملکرد سیستم رباتیک دارند.
و در نهایت استفاده از سیستم های کنترل شبکه عصبی برای سیستم های رباتیک. مزیت اصلی یک شبکه عصبی این است که نیازی به دانستن یا ایجاد یک مدل ریاضی از یک شی نیست، زیرا شبکه عصبی یک تقریب کننده فازی جهانی است.
شی (سیستم رباتیک) به عنوان یک "جعبه سیاه" عمل می کند. یک شبکه عصبی می تواند به عنوان یک مدل مرجع برای یک سیستم رباتیک کنترل شده عمل کند. لازم به ذکر است که این باید یک شبکه عصبی چند لایه یادگیری (شناسه شی) باشد. مدل شبکه عصبی بر اساس عدم تطابق بین سیگنال های خروجی شی و مدل به شی کنترل تنظیم می شود. همچنین یک نمونه آموزشی برای تنظیم و تنظیم دستگاه کنترل مطابق با معیار کیفیت انتخاب شده تشکیل می دهد.
نتیجه
تجزیه و تحلیل، ترکیب معماری یک سیستم کنترل هوشمند برای سیستمهای رباتیک را امکانپذیر ساخت، که با توجه به ویژگیهای عملکرد تغییر نمیکند. الگوریتم شناسایی موقعیتی توسعه یافته امکان ساخت نقشه های حسی بسیار آموزنده از محیط خارجی را فراهم می کند. رویکردهای اصلی برای تشکیل سیستمهای کنترل هوشمند برای سیستمهای رباتیک شرح داده شدهاند. جهت توسعه آینده موثرترین روش های هوش مصنوعی مورد استفاده برای اجرای دستگاه های کنترلی نشان داده شده است.
کتابشناسی - فهرست کتب
1. Yurevich E. I. مبانی رباتیک. - سن پترزبورگ: BHV-Petersburg, 2007. - 416 p.
2. سیستم های دستکاری ربات ها / ویرایش. A. I. Korendyaseva. - م.: مهندسی مکانیک، 1368. - 472 ص.
3. Burdakov S. F. سنتز تنظیم کننده های قوی با عناصر الاستیک: مجموعه مقالات. علمی tr. - شماره 443. مکانیک و فرآیندهای کنترل. - سن پترزبورگ: دانشگاه فنی دولتی سن پترزبورگ، 1992.
4. Protalinsky O. M. کاربرد روش های هوش مصنوعی در اتوماسیون فرآیندهای تکنولوژیکی: تک نگاری. - آستاراخان: انتشارات ASTU، 2004. - 184 ص.
مقاله در 13 ژانویه 2010 توسط سردبیر دریافت شد
مدیریت فکری سیستم های رباتیک در شرایط عدم قطعیت
I. A. Shcherbatov
هدف کار ارائه شده، شکلگیری رویکردهایی برای ساخت سیستمهای کنترل فکری سیستمهای رباتیک است که در رابطه با ویژگی عملکرد، با در نظر گرفتن ناقص بودن اطلاعات ورودی و انواع مختلف عدم قطعیت، تغییرناپذیر است. تجزیه و تحلیل، اجازه سنتز معماری یک سیستم کنترل فکری سیستم های رباتیک را که در رابطه با ویژگی عملکرد ثابت است، انجام می شود. الگوریتم توسعه یافته شناسایی موقعیتی اجازه می دهد تا کارت های لمسی خوبی از محیط ایجاد کنید. رویکردهای اساسی برای تشکیل سیستم های کنترل فکری سیستم های رباتیک شرح داده شده است. جهت توسعه چشم انداز موثرترین روش های هوش مصنوعی اعمال شده برای اجرای دستگاه های محرک نشان داده شده است.
کلمات کلیدی: سیستم رباتیک، ربات، مدیریت فکری، عدم قطعیت ساختاری، ناقص بودن اطلاعات، کارت لمسی، شبکه عصبی، نظریه مجموعه های نامشخص، سیستم خبره خودآموز.
مفاهیم: سیستم هوشمند (IntS)، سیستم کنترل هوشمند (IntSU)
مفهوم "سیستم هوشمند" توسط محققان مختلف به طور متفاوتی تفسیر شده است. بیایید موارد اصلی، از جمله توضیحات همراه را در نظر بگیریم.
سیستم هوشمندیک سیستم اطلاعاتی و محاسباتی با پشتیبانی هوشمند برای حل مسائل بدون مشارکت اپراتور (تصمیم گیرنده - تصمیم گیرنده) است. سیستم هوشمندیک سیستم اطلاعاتی و محاسباتی با پشتیبانی هوشمند برای حل مسائل با مشارکت یک اپراتور - تصمیم گیرنده است. فناوری های هوشمند پایه، از جمله شبکه های عصبی مصنوعی (ANN)، الگوریتم های ژنتیک، منطق فازی، می توانند به طور موثر در ایجاد سیستم های کنترل استفاده شوند. در عین حال، امکان استفاده از آنها با توانایی اجرای طرح های محاسباتی توزیع شده تعیین می شود که امکان گسترش فضای جستجو را بدون افزایش قابل توجهی پیچیدگی محاسبات لازم فراهم می کند. توانایی توصیف فرآیندهای کنترلی با استفاده از زبان "ساده"، نزدیک به طبیعی. امکان نمایش غیر تحلیلی اشیاء کنترل غیرخطی و توصیف فرآیندهایی که با ابهام و تعداد زیادی موقعیت خاص مشخص می شوند. توانایی جستجوی سریع در فضا برای راه حل مشکلات ضعیف رسمی.
سیستم های هوشمنداینها سیستم های دانش محور هستند. هنگامی که دانش در رایانه پردازش می شود، به طور مشابه به داده ها تبدیل می شود: 1) دانش در حافظه انسان در نتیجه تفکر. 2) حامل های مادی دانش (کتاب های درسی، وسایل کمک آموزشی). 3) زمینه دانش - توصیف مشروط از اشیاء اصلی حوزه موضوعی، ویژگی ها و الگوهای آنها که آنها را به هم متصل می کند. 4) بازنمایی دانش بر اساس هر مدلی (تولید، معنایی، قاب یا موارد دیگر). مدل تولید یا مدل مبتنی بر قانون اجازه میدهد دانش در قالب جملاتی مانند "اگر , که" شبکه معنایی یک گراف جهت دار است که رئوس آن مفاهیم و قوس های آن روابط بین آنها هستند. فریم یک ساختار داده برای نمایش برخی از شی های مفهومی است. 5) پایگاه دانش در مورد رسانه های ذخیره سازی کامپیوتر. هنگام استفاده از مدل تولید، پایگاه دانش شامل مجموعه ای از قوانین است. برنامه ای که شمارش قوانین را کنترل می کند موتور استنتاج (موتور استدلال، موتور استنتاج، موتور قیاسی، مفسر، مفسر قانون، حل کننده) نامیده می شود. دستگاه خروجی به صورت چرخه ای کار می کند. در هر چرخه، به حقایق موجود از حافظه کاری (پایگاه داده) و قوانین از پایگاه دانش نگاه می کند و سپس آنها را با هم مقایسه می کند. مجموعه قوانین منتخب مجموعه به اصطلاح تعارض را تشکیل می دهد (یعنی در یک موقعیت خاص می توان چندین قانون را همزمان اعمال کرد). برای حل یک تضاد، موتور استنتاج معیاری دارد که با آن یک قانون واحد را انتخاب می کند و پس از آن فعال می شود. این در ورود حقایق (اقدامات توصیه شده) که نتیجه قاعده را در حافظه کاری تشکیل می دهند یا در تغییر معیار انتخاب قوانین متضاد بیان می شود. اگر نتیجه قاعده شامل نام یک عمل باشد، آن را تحریک می کند. موتور استنتاج بر اساس اصل مدوس ponens است که به شرح زیر تفسیر می شود: "اگر گزاره A درست شناخته شود و قاعده ای به شکل "اگر A پس B" وجود داشته باشد، گزاره B درست است.
زیر سیستم های هوشمندهر سیستم بیولوژیکی، مصنوعی یا رسمی را که توانایی مشارکت در رفتار هدفمند را نشان می دهد را درک کنید. دومی شامل ویژگی های (تجلیات) ارتباطات، انباشت دانش، تصمیم گیری، یادگیری، سازگاری است. تحقیقات هوش مصنوعی مبتنی بر رویکرد دانش است. تکیه بر دانش پارادایم اساسی هوش مصنوعی است. در اثر، تفاسیر دانش در چهار گروه (یا سطح) ترکیب شده است: روانشناختی، فکری، رسمی-منطقی و اطلاعات-فناوری. تفسیر روانشناختی دانش - تصاویر ذهنی، مدل های ذهنی. تفسیر عقلانی دانش مجموعه ای از اطلاعات در مورد یک حوزه موضوعی معین، از جمله حقایق در مورد اشیاء یک حوزه موضوعی معین، ویژگی های این اشیاء و روابط مرتبط با آنها، توصیف فرآیندهای رخ داده در یک حوزه موضوعی معین، و همچنین اطلاعات است. در مورد راه های حل مسائل معمولی تفسیر رسمی-منطقی اطلاعات رسمی در مورد یک حوزه موضوعی خاص است که برای به دست آوردن (استنتاج) دانش جدید در مورد این حوزه موضوعی با استفاده از روش های تخصصی استفاده می شود. تفسیر فناوری اطلاعات - اطلاعات ساختاری ذخیره شده در حافظه رایانه و استفاده در عملیات برنامه های هوشمند.
در آثار D.A. پوسپلوفو همکارانش موارد زیر را شرح دادند ویژگی های مفهومی دانش: تفسیرپذیری درونی،به عنوان وجود نامهای منحصربهفرد که هر واحد اطلاعاتی را شناسایی میکنند، درک میشود. ساختار،که امکان تودرتوی بازگشتی واحدهای اطلاعاتی منفرد را در یکدیگر تعیین می کند. اتصال خارجی،تعریف امکان برقراری روابط عملکردی، اتفاقی و سایر انواع روابط بین واحدهای اطلاعاتی؛ مقیاس پذیری،مشخص کردن امکان معرفی معیارهای مختلف برای ثبت روابط کمی، ترتیبی و سایر واحدهای اطلاعاتی؛ فعالیت، منعکس کننده توانایی شروع برخی اقدامات مناسب هنگام ظاهر شدن اطلاعات جدید است.
سیستم اطلاعات هوشمند(یا سیستم مبتنی بر دانش) مبتنی بر مفهوم استفاده از پایگاه دانش برای ایجاد گزینه هایی برای حل مسائل کاربردی طبقات مختلف بسته به نیازهای اطلاعاتی خاص کاربران است. هدف اصلی از ساخت چنین سیستم هایی شناسایی، مطالعه و به کارگیری دانش متخصصان مجرب برای حل مشکلات پیچیده ای است که در عمل به وجود می آیند. هنگام ساخت سیستم های مبتنی بر دانش، از دانش انباشته شده توسط متخصصان در قالب قوانین خاص برای حل مشکلات خاص استفاده می شود. هدف این جهت تقلید از هنر انسان در تحلیل مسائل بی ساختار و نیمه ساختار یافته است.
در تئوری کاربردی سیستمهای هوشمند (IntS)، سیستم کنترل تنها در تعامل نزدیک با دنیای بیرونی اطراف آن در نظر گرفته میشود و سیستم هوشمند به عنوان مجموعهای از سوژهها و اشیا (سوژهها) فعال در مقابل آنها تعبیر میشود که توسط آنها ایجاد میشود. امکان موقعیتی وجود فعال سوژه، یا توسط وظیفه هدفی یک سوژه سیستمی یا برون سیستمی، و همه عناصر هر ماهیتی که نظام فکری را تشکیل می دهند، تحت تأثیر جهان بیرونی مشترک آنها قرار می گیرند. .
در کار A.V. تیموفیف و R.M. یوسفوف گفت که IntSU شامل عناصر هوش مصنوعی است که به فرد اجازه می دهد مفاهیم را شکل دهد و دانش را جمع آوری کند، رفتار برنامه ریزی کند و در شرایط نامشخص تصمیم بگیرد، تصاویر را تشخیص دهد و مدلی از محیط را شکل دهد. معرفی عناصر هوشمند به سیستم های کنترل خودکار (ACS) عملکرد آنها را به طور قابل توجهی گسترش می دهددر مقایسه با اسلحه های خودکششی تطبیقی. در نتیجه روشنفکری، تفنگ های خودکششی توانایی حل انواع خاصی از وظایف فکری را که معمولاً به انسان ها محول می شد به دست می آورند. بنابراین، IntSU به طور فزاینده ای در مواردی استفاده می شود که وضعیت اجازه نمی دهد (توجیه نمی کند) مشارکت مستقیم یک اپراتور انسانی در فرآیند کنترل یا زمانی که لازم است شدت کار اپراتور کاهش یابد زمانی که شی کنترلی در حالت های عادی کار می کند. .
نیاز به فکری کردن سیستمهای کنترل خودکار معمولاً در مواردی ایجاد میشود که اشیاء کنترلی پیچیده هستند (به عنوان مثال، اشیاء با دینامیک غیرخطی که در شرایط عدم قطعیت عمل میکنند)، و توصیف و تعامل آنها با محیط به سختی ساختاردهی و رسمیسازی میشود. ناقص بودن توصیف هم در عدم قطعیت پیشینی مدل شی و محیط و هم در عدم قطعیت و تنوع اهداف مدیریت آشکار می شود. اغلب توصیف رفتار چنین اشیایی مبهم است و حاوی اطلاعات کیفی (ارزیابی های کارشناسی، نتیجه گیری های قابل قبول، عملکردهای عضویت) است. حل مسائل کنترلی در چنین شرایطی بدون استفاده از روشهای هوش مصنوعی، یعنی بدون فکری کردن سیستمهای کنترل خودکششی غیرممکن است.
بنابراین، فکری کردن سیستم های کنترل خودکار به بازنمایی و پردازش دانش در مورد محیط، شی و سیستم کنترل با استفاده از ابزارهای لازم برای یادگیری و سازگاری خلاصه می شود. این دانش و ابزار، اصلاح مدل شی کنترلی و محیط را ممکن میسازد و به ACS ویژگیهای اساسی جدید، مشابه تواناییهای فکری یک اپراتور یا متخصص انسانی میدهد. ویژگی های مشخصه IntSU توانایی آنها در یادگیری و خودآموزی از طریق شکل گیری دانش، ترکیب و شناسایی الگوهای رفتاری، تشخیص و تجزیه و تحلیل موقعیت ها، خود سازماندهی و سازگاری در رابطه با عوامل مختلف است. این توانایی ها امکان جبران عوامل مختلف عدم قطعیت داخلی و خارجی را که در حین کار ACS به وجود می آیند، و در نتیجه بهبود یا بهینه سازی کیفیت کنترل را ممکن می سازد.
در ادامه IntSU سیستمی را می نامیم که در آن دانش در مورد ویژگی های ناشناخته شیء کنترل و محیط در فرآیند یادگیری و سازگاری شکل می گیرد و اطلاعات به دست آمده در فرآیند تصمیم گیری خودکار کنترلی استفاده می شود تا کیفیت کنترل بهبود می یابد توجه داشته باشید که فرآیندهای یادگیری و انطباق می تواند به صورت جدا از فرآیند کنترل اتفاق بیفتد (مثلاً در حالت آموزش با معلم که معمولاً توسط اپراتور انسانی یا متخصص بازی می شود) یا مستقیماً در فرآیند کنترل خودکار در زمان واقعی. .
اجازه دهید ویژگی های ساختار عملکردی نمایندگان معمولی کلاس سیستم های کنترل هوشمند را در نظر بگیریم و آنها را در رابطه با اشیاء کنترل فن آوری (واحدها، ماشین ها، مجتمع های ماشین) تفسیر کنیم.
برنامه شماره 14 پژوهش بنیادی OEMMP RAS
"تحلیل و بهینه سازی عملکرد سیستم های کنترل چند سطحی، هوشمند و شبکه ای تحت شرایط عدم قطعیت"
1. دلیل برنامه
1.1. اهمیت علمی و عملی
توسعه فشرده فناوری (شبکه سازی، کوچک سازی رایانه ها، افزایش سرعت آنها و غیره) تقاضاهای جدیدی را بر روی سیستم های کنترل مدرن ایجاد می کند و فرصت های جدیدی را هم در سطح سیستم های کنترل جاسازی شده (در سطح مراکز بزرگ اعزام) و هم در سطح شبکه (ارتباطات) شبکه، گروه) تعامل سیستم های چند عاملی غیرمتمرکز.سیستم های کنترل به طور فزاینده ای ویژگی سیستم های مدیریت اطلاعات را به دست می آورند و در تلاقی تئوری های کنترل، محاسبات و ارتباطات مورد مطالعه قرار می گیرند. بنابراین، در نظر گرفتن ویژگیهای کانالهای ارتباطی، به عنوان مثال، در سیستمهای غیرمتمرکز (چند عاملی) ضروری است و ویژگیهای رایانه داخلی هنگام پیادهسازی در سیستمهای کنترل چند سطحی مانند عملکردهای هوشمند مانند دید فنی مهم است. برنامه ریزی اقدام، آموزش، تصمیم گیری چند معیاره، تأمل و غیره به طور خاص، فکری کردن مدیریت به منظور افزایش میزان استقلال عملکرد سیستم ها، زمانی که فقدان مدل های کمی پویا یا اختلال در عملکرد وجود دارد، در نظر گرفته شده است. شیء کنترل، باعث از بین رفتن کفایت مدل های کمی می شود (به عنوان مثال، معادلات توصیف کننده تکامل یک سیستم پیچیده)، نقش کیفی (به اصطلاح "دانش"، به عنوان مثال، مدل های منطقی-زبانی) را تقویت می کند. از شی و محیط مورد استفاده در سطوح بالای سیستم کنترل.
این برنامه با هدف حل مشکلات اساسی ناشی از اولویت های علم، فناوری و مهندسی فدراسیون روسیه است. وظیفه به دست آوردن نتایج بنیادی و کاربردی جدید در زمینه تئوری کنترل سیستم های پیچیده فنی، انسان-ماشین و غیره با در نظر گرفتن عدم قطعیت و کمبود اطلاعات اولیه از جمله: تئوری تجزیه و تحلیل و سنتز سیستم های تصادفی تعیین شده است. ، تئوری ایجاد سیستم های کنترل حرکت و فرآیندهای فناورانه، با تشخیص و نظارت بر وضعیت فنی فعلی و همچنین تئوری ایجاد سیستم های طراحی خودکار و کنترل هوشمند مبتنی بر فناوری های نوین اطلاعاتی.
با توجه به تنوع استفاده از تئوری کنترل، تجزیه و تحلیل و بهینه سازی در کاربردهای مختلف (حمل و نقل، لجستیک، ساخت، سیستم های هوانوردی و فضایی، زیردریایی ها و کشتی های سطحی و غیره)، لازم است تعداد زیادی از عوامل پیچیدگی در نظر گرفته شود. ، مانند:
· مدیریت چند سطحی،
· عدم تمرکز،
· غیر خطی بودن،
· تعدد،
· توزیع پارامترها،
· مقیاس های مختلف فرآیندها در مکان و زمان،
· بعد بالا،
· ناهمگونی توصیف زیرسیستم ها،
· چند حالته،
· وجود تأثیرات تکانه،
· وجود اختلالات مختصات پارامتری، ساختاری، منظم و منفرد،
استفاده از مدل های قطعی و احتمالی برای توصیف عدم قطعیت اطلاعات در مورد بردار حالت و پارامترهای سیستم، در مورد ویژگی های خطاهای اندازه گیری و محیط خارجی،
وجود اثرات تاخیری در کنترل یا شیء،
· پیچیدگی ساختاری کلی سیستم های کنترل مدرن.
برای دستیابی به هدف تعیین شده و حل وظایف اصلی، این برنامه شامل تحقیق و توسعه در زمینه های اصلی زیر است:
1. تجزیه و تحلیل و بهینه سازی عملکرد در مقیاس های زمانی مختلف سیستم های کنترل چند سطحی با اطلاعات ناقص.
2. مدیریت و بهینه سازی در سیستم های چند سطحی و غیرمتمرکز ماهیت سازمانی و فنی.
2.1. مدیریت و بهینه سازی در سیستم های شبکه محور
2.2. کنترل هوشمند اجسام متحرک
2.3. مدلسازی و بهینهسازی اطلاعات و سیستمهای کنترل همزمان چند سطحی.
جهت 1. تجزیه و تحلیل و بهینه سازی عملکرد در مقیاس های زمانی مختلف سیستم های کنترل چند سطحی با اطلاعات ناقص
پیچیدگی بسیاری از سیستم های کنترل مدرن اغلب اجازه نمی دهد که از قبل توصیف کاملی از فرآیندهای رخ داده در سیستم و تعامل آن با محیط بدست آوریم. به عنوان یک قاعده، سیستم های واقعی با معادلات دینامیک غیر خطی توصیف می شوند و اغلب مدل های ریاضی سیستم های کنترل فقط محدوده های مجاز تغییرات در پارامترها و ویژگی های عناصر جداگانه را بدون تعیین این پارامترها و ویژگی ها در نظر می گیرند.
علاوه بر این، در برخی از سیستمها، بهویژه میکرومکانیکی و کوانتومی، استفاده از روشهای کلاسیک توصیف در زمان پیوسته یا گسسته به دلیل این واقعیت که نیروهای برهمکنش داخلی و/یا خارجی در حال ظهور و همچنین اقدامات کنترلی زودگذر هستند، پیچیده میشود. ماهیت تکانشی است و نمی توان آن را به طور دقیق محاسبه کرد. به نظر می رسد این سیستم در مقیاس های زمانی مختلف عمل می کند: واقعی (آهسته) و سریع (نبض). چنین تنوع زمانی یک ویژگی داخلی بسیاری از سیستم های کنترل مدرن است، از جمله سیستم هایی با کنترل چند سطحی، که در آن سطوح بالا از مدل های کیفی و گسسته استفاده می کنند و سطوح پایین اغلب از مدل های کمی با زمان پیوسته استفاده می کنند.
به همین دلیل، توسعه روشهایی برای رسمیسازی ریاضی توصیف عملکرد چنین سیستمهایی در زمان ترکیبی (پیوسته-گسسته)، مطالعه ویژگیهای آنها برای کنترلپذیری و پایداری در شرایط اطلاعات ناقص، مقابله و محدودیتهای غیر استاندارد. در مورد کنترل ها و متغیرهای فاز یک کار فوری است. یک کار به همان اندازه مهم، توسعه روش هایی برای سنتز کنترل بهینه چنین سیستم های پیوسته-گسسته، هم قطعی و هم تصادفی است.
علاوه بر این، در شرایط عدم قطعیت و عدم وجود اطلاعات پیشینی، وظایف بهینه سازی فرآیند جمع آوری و پردازش اطلاعات (مدیریت مشاهده و فیلترینگ بهینه) بسیار مرتبط است.
جهت 2. مدیریت و بهینه سازی در سیستم های چند سطحی و غیرمتمرکز ماهیت سازمانی و فنی
2.1. مدیریت و بهینه سازی در سیستم های شبکه محور
سیستم های پیچیده سازمانی و فنی مدرن با ابعاد بالا، تمرکززدایی، مدیریت چند سطحی، نیاز به برنامه ریزی موثر فعالیت ها با در نظر گرفتن آموزش، تصمیم گیری های چند معیاره و بازتاب موضوعات مدیریت شده مشخص می شوند.
مشکلات برنامه ریزی و کنترل سیستم های چند متصل توزیع گسسته و پیوسته با ابعاد بزرگ نیز با فرآیندهای چند مقیاسی نه تنها در زمان، بلکه با توزیع و ماهیت چند مقیاسی فضا مشخص می شود و یکی از پیچیده ترین ها را نشان می دهد. و کلاس های کار فشرده مسائل بهینه سازی. به همین دلیل، توسعه روش ها و رویکردهای تحقیق برای یافتن راه حل های دقیق و تقریبی و همچنین ابزارهای شبیه سازی برای استفاده در سیستم های پشتیبانی تصمیم برای برنامه ریزی، طراحی و مدیریت پیچیده فنی، سازمانی (شامل حمل و نقل و لجستیک) و سیستم های اطلاعاتی توصیه می شود. .
برای مدیریت تعامل گروهی اجزای سیستم های غیرمتمرکز سازمانی و فنی (سیستم های شبکه محور، سیستم های تولید، محاسبات، مخابرات و سایر شبکه ها و غیره) تحت شرایط محدودیت در کانال های ارتباطی و پیچیدگی محاسبات، ویژگی های فرآیندهای پردازش اطلاعات. و همچنین محدودیت در زمان تصمیم گیری، قابلیت های محاسباتی و ظرفیت کانال ارتباطی. بنابراین، توسعه روش هایی برای بهینه سازی (با در نظر گرفتن محدودیت های ذکر شده) ساختار سیستم های پیچیده سازمانی و فنی، از جمله با در نظر گرفتن همزمان بسیاری از معیارها: جزئیات داده های اولیه، کارایی جمع آوری اطلاعات، برنامه ریزی و تصمیم گیری انعکاسی مرتبط است. ساخت، بهره وری محدود از رایانه های فردی، کاهش تکرار کار، و همچنین سهم محاسبات کمکی مرتبط با سرویس انتقال داده ها.
سیستم های چند سطحی و غیرمتمرکز با تصمیم گیری توزیع شده در زمان واقعی در شرایط مقابله با اطلاعات، و همچنین اطلاعات ناقص و ناهمگن، اغلب دارای ماهیت کیفی و ذهنی چند معیاره مشخص می شوند. به همین دلیل، توسعه روش هایی برای ایجاد سیستم های پشتیبانی اطلاعاتی کافی و حمایت از تصمیم گیری های استراتژیک و عملیاتی در شرایط ناقص اطلاعات و مقابله ضروری است. برای این منظور، به ویژه توصیه می شود: مدل های چند عاملی سیستم های سازمانی و فنی پویا، از جمله مدل های شبکه با عوامل متضاد، مدل های رفتار گروهی و پیش بینی آن، ارزیابی تعادل منافع و شکل گیری ائتلاف در این سیستم ها و همچنین توسعه فناوری های اطلاعاتی و ابزارهای ارائه اطلاعات در مورد محیط خارجی و دانش عوامل هوشمند.
2.2. کنترل هوشمند اجسام متحرک
همیشه نمیتوان مدلهای کمی را برای حل مسائل تعیینشده ایجاد کرد، بنابراین در کنار روشهای سنتی، برنامه از روشهای هوش مصنوعی استفاده میکند. هوش مصنوعی بهعنوان حوزهای از دانش، طی پنجاه سال گذشته، هم در توسعه و تبیین مفهوم هوش و هم در زمینه کاربرد عملی هوش مصنوعی در زمینههای مختلف فعالیتهای انسانی، جهش عظیمی را پشت سر گذاشته است. در فناوری، اقتصاد، تجارت، پزشکی، آموزش و ... بسیاری از مفاهیم نظری و روش های هوش مصنوعی به فناوری های هوشمند کاربردی مبتنی بر دانش تبدیل شده اند.
ویژگی نسل مدرن سیستم های هوشمند این است که آنها بر اساس یک مدل پیچیده از محیط خارجی هستند که هم اطلاعات کمی و هم مدل های کیفی را در نظر می گیرد - دانش در مورد رفتار احتمالی اشیاء مختلف محیطی و روابط آنها با یکدیگر. استفاده از چنین مدل هایی به لطف توسعه روش هایی برای نمایش دانش، روش هایی برای یکپارچه سازی داده ها از منابع مختلف و افزایش قابل توجه سرعت و ظرفیت حافظه رایانه ها امکان پذیر شد.
وجود مدلی از محیط خارجی به سیستمهای هوشمند مدرن برای کنترل اجسام متحرک اجازه میدهد تا در شرایط چند معیاره، عدم قطعیت و ریسک تصمیمگیری کنند و کیفیت این تصمیمها میتواند از کیفیت تصمیمگیریهای فرد در شرایطی فراتر رود. اضافه بار اطلاعات، زمان محدود و استرس.
در این راستا، یک کار فوری توسعه ابزارها و روش های جدید برای توسعه کنترل هوشمند اجسام متحرک در حضور عوامل ذکر شده در بالا است.
2.3. مدلسازی و بهینهسازی اطلاعات و سیستمهای کنترل همزمان چند سطحی
ارتباط تحقیق در این جهت به دلیل نیاز به توسعه روشهایی برای تجزیه و تحلیل و سنتز سیستمهای اطلاعات و کنترل زمان واقعی مدولار چند سطحی باز (ICS RV) اجسام چند حالته و چند منظوره است که تحت شرایط عدم قطعیت، اختلالات ساختاری و شرایط اضطراری (ESS). در میان این اشیاء کنترلی، اشیاء حیاتی و سیستمهای استفاده مسئولانه هستند که امنیت دولت را تعیین میکنند.
بدیهی است که مشکلات و وظایف ایجاد سیستم های این کلاس را می توان با موفقیت بر اساس توسعه یک تئوری یکپارچه و روش های کاربردی برنامه محور تحلیل پویا و سناریو و سنتز ساختار چنین سیستم هایی، الگوریتمی آنها حل کرد. پشتیبانی نرم افزاری و اطلاعاتی و مکانیسم هایی برای توسعه اقدامات مدیریتی موثر. اینها، اول از همه، شامل توسعه یک روش رسمی برای طراحی سیستم های مدیریت اطلاعات باز، از جمله مدل ها و روش هایی برای سنتز ساختار مدولار بهینه I&C RT شی گرا با معماری باز با توجه به معیارهای مختلف کارایی است. بر اساس نتایج بهدستآمده در مرحله تحلیل پویا، ساختار ماژولار عملکردی بهینه پردازش و کنترل دادهها سنتز میشود، یعنی ترکیب بهینه و تعداد ماژولهای RT IMS تعیین میشود، رابط سیستم سنتز میشود و ساختار از نرم افزار و پشتیبانی اطلاعاتی آن برای پردازش جریان های ورودی درخواست ها تعیین می شود.
برای برنامه ریزی اقدامات و حمایت از تصمیم گیری در شرایط عدم اطمینان، اختلالات ساختاری و شرایط اضطراری، استفاده از روش های تحلیل سناریو و ترکیب اقدامات کنترلی موثر در ICS RV توصیه می شود. در این حالت، یک مدل ریاضی از انتشار اختلالات ساختاری و موقعیتهای اضطراری به زبان نمودارهای علامتدار وزنی یا عملکردی تشکیل میشود. بر اساس این مدل، سناریوهای منطقی برای مدیریت اشیاء با استفاده از مفاهیم پتانسیل عملکرد، دوام و بقای عناصر تشکیل دهنده آنها سنتز خواهند شد. ترکیب سناریوها برای از بین بردن علل و پیامدهای موقعیت های اضطراری در اشیاء هدف چند حالته با در نظر گرفتن محدودیت های زمان و منابع به صورت پویا انجام می شود. همچنین لازم است فرمولها و روشهایی برای حل مشکلات معکوس کنترل بقای اجسام چند منظوره و چند منظوره که در شرایط عدم قطعیت، اختلالات ساختاری و موقعیتهای اضطراری کار میکنند، ایجاد شود.
ویژگی های سیستم های کنترل و اشیاء ذکر شده در بالا، اهمیت علمی و عملی حل مسائل کنترل، تجزیه و تحلیل و بهینه سازی برای آنها به ما امکان می دهد اهداف و اهداف اصلی برنامه را تدوین کنیم.
1.2. اهداف و مقاصد اصلی
هدف اصلی این برنامه حل مشکلات اساسی تئوری کنترل است که مانع از اجرای پروژه های امیدوارکننده با اهمیت ملی در زمینه مدیریت سیستم های پیچیده پویا و هوشمند با کاربردهایی برای کنترل حرکت اشیاء و فرآیندهای فنی در فناوری و سازمانی می شود. سیستم های.
تحقیق در مورد موضوعات کلی زیر انجام خواهد شد.
جهت 1
· توسعه روش هایی برای تثبیت سیستم های غیرخطی در شرایط اندازه گیری ناقص مختصات و محدودیت های ساختار مجاز نیروهای کنترلی.
· توسعه روش هایی برای مشاهده و کنترل قوی و تطبیقی تحت مدل های قطعی، احتمالی و سایر مدل های عدم قطعیت پارامترهای شی کنترل و محیط عملیاتی.
· توسعه روش ها و الگوریتم های تحلیل کیفی و کمی مدل های دینامیکی پیوسته گسسته پیوسته، گسسته و چند سطحی و سنتز کنترل بر اساس روش کاهش با توابع مقایسه بردار و ماتریس و تبدیل مدل.
· بررسی مسئله کنترل بهینه دسته جدیدی از سیستم های مکانیکی که در محیط های مقاومتی حرکت می کنند با تغییر پیکربندی یا حرکت بدنه های داخلی.
· توسعه روش هایی برای رسمی سازی ریاضی و حل مشکلات اندرکنش ضربه ای سیستم های مکانیکی در حضور اصطکاک خشک.
· توسعه روش هایی برای کنترل بهینه سیستم های دینامیکی گسسته-پیوسته و ضربه ای.
· توسعه روش هایی برای کنترل تضمینی اشیاء غیرخطی در معرض اختلالات کنترل نشده در قالب بازی های پویا.
· توسعه تئوری کنترل سیستم های کوانتومی.
· توسعه روش ها و الگوریتم ها برای تجزیه و تحلیل ویژگی های دینامیکی مانند پایداری، تغییر ناپذیری، اتلاف پذیری برای ارزیابی وضعیت و سنتز کنترل چند سطحی سیستم ها با توصیف ناهمگن از پویایی فرآیندها در سطوح مختلف.
جهت 2.1
· روش هایی برای حل مسائل کنترلی برای سیستم های شبکه محور در مقیاس بزرگ با پارامترهای توزیع شده و فرآیندهای چند مقیاسی (در مکان و زمان).
· مدل ها و روش های مدیریت هوشمند شبکه ارتباطی غیرمتمرکز پروژه ها و برنامه های توزیع شده.
· روش های بهینه سازی ساختار سیستم های چند سطحی و غیرمتمرکز.
· روش ها و ساختارهای پیاده سازی کامپیوتری کنترل شبکه محور در یک فضای همگن ریاضی از محاسبات توزیع شده و موازی.
· مدل ها و روش های تصمیم گیری گروهی بر اساس اطلاعات ناقص، ناهمگن، کیفی و ذهنی.
· مدل ها و روش های برنامه ریزی و مدیریت مجتمع های عملیات مرتبط در سیستم های فنی و حمل و نقل و لجستیک پیچیده.
· توسعه اصول، معماری، روش ها و الگوریتم های ایجاد سیستم های هوشمند نرم افزاری توزیع شده بر اساس فناوری های چند عاملی.
· توسعه مدل ها و روش های مدیریت اطلاعات در ساختارهای شبکه چند عاملی.
جهت2.2
· توسعه مدل های تعمیم یافته مدیریت موقعیتی، منعکس کننده ویژگی های گنجاندن عناصر فازی، شبکه عصبی و منطقی- دینامیکی در ساختار مدل ها.
· توسعه یک روش برنامه ریزی مسیر که ویژگی پایداری ارتباط گروهی از اشیاء دینامیکی کنترل شده، ناهمگن (کمی و کیفی) را در نمایش مدل آنها تضمین می کند.
· توسعه روشهایی برای تجزیه و تحلیل و سنتز پلتفرمهای مدلسازی بلادرنگ تطبیقی که غیرخطی بودن، چند اتصالی بودن و ابعاد بالای اشیاء کنترلی را با کاربرد برای اجسام متحرک دریایی در نظر میگیرد.
· بهینه سازی سیستم های هوشمند برای کنترل چند سطحی اجسام متحرک در یک محیط درگیری با در نظر گرفتن تعامل گروهی، چند معیاره، عدم قطعیت و ریسک.
· توسعه روش های ارائه چشم انداز فنی برای سیستم های کنترل هوشمند.
· توسعه روش هایی برای کنترل هوشمند اجسام پویا که مانورهای پیچیده را انجام می دهند، بر اساس سازماندهی حرکت اجباری در فضای حالت سیستم.
جهت2.3
· مدلها و روشهای تحلیل و بهینهسازی ساختار مدولار سیستمهای اطلاعاتی و کنترلی چندسطحی شیگرا با معماری باز تحت شرایط عدم قطعیت و اختلالات ساختاری.
· روش های تحلیل و بهینه سازی حالت های سیستم های قدرت الکتریکی و مدیریت آنها.
· مدل ها و روش های رویکرد سناریو-شاخص برای جستجوی نقاط آسیب پذیر برای وظایف مدیریت.
· روش های مدل سازی، تحلیل و بهینه سازی فرآیندهای چند حالته برای کنترل اجسام متحرک.
· توسعه روش ها و الگوریتم ها برای شناسایی هوشمند اشیاء غیر ثابت غیر خطی برای بهبود کارایی کنترل با تشکیل یک پایگاه دانش فناورانه بر اساس اطلاعات پیشینی در مورد شی کنترل.
· فناوریهای اطلاعات جغرافیایی برای مدلسازی مجتمعهای طبیعی-فناوری در مشکلات مدیریت اکوسیستمهای کلان شهرها.
· تجزیه و تحلیل و بهینه سازی پشتیبانی اطلاعات برای سیستم های ناوبری و کنترل.
· مدل ها و روش های مدیریت فرآیند تولید.
نتایج تئوری توسعهیافته و روشهای تحلیل و سنتز سیستمهای کنترلی در زمینههای زیر استفاده خواهد شد:
· کنترل ترافیک در هوانوردی و فضانوردی، اشیاء زمینی و دریایی، وسایل نقلیه؛
· سیستم های شبکه محور چند عاملی، سیستم های تولید، محاسبات، مخابرات و سایر شبکه ها ;
· سیستم های حمل و نقل و لجستیک ;
· انرژی جهانی، حمل و نقل گاز و سایر سیستم های زیرساختی در مقیاس بزرگ.
· سیستم های پشتیبانی اطلاعات برای وظایف مدیریتی و پشتیبانی از اتخاذ تصمیمات استراتژیک و عملیاتی در شرایط ناقص اطلاعات و مقابله.
مشکلات اساسی تئوری ساخت سیستم های کنترل مستلزم توسعه فشرده آنها است. توسعه تحقیقات در این راستا اجازه می دهد:
توسعه مبانی نظری برای حل مسئله پیچیده سه گانه کنترل-محاسبات-ارتباط (مشکل - " کنترل- محاسبات- ارتباط") برای اطلاعات پیچیده و سیستم های کنترل، از جمله در شرایط محدودیت در کانال های ارتباطی و خرابی های زیر سیستم؛
حل مشکلات مدیریت اشیاء و فرآیندهای اساسی جدید مربوط به اشیاء متحرک، اشیاء با هدف خاص، سیستم های فن آوری و سازمانی.
ایجاد روش های مؤثر برای تشخیص عملکرد و اطمینان از تحمل خطا در سیستم های کنترل هواپیما و سایر اجسام متحرک و همچنین پایداری دینامیکی سیستم های قدرت الکتریکی.
بهبود کیفیت، سرعت بخشیدن و کاهش هزینه های توسعه راه حل های طراحی از طریق الگوریتم سازی و اتوماسیون فرآیند توسعه سیستم کنترل.
از این پس، کنترل به معنای گسترده ای از جمله شبکه ارتباطی، گروهی، کنترل توزیع شده (در ادبیات انگلیسی - کنترل در شبکه ها، کنترل بر شبکه ها، کنترل توزیع شده و غیره) درک می شود.