Objekt upravljanja inteligentnih sustava upravljanja. Pojmovi: inteligentni sustav (IntS), inteligentni sustav upravljanja (IntSU). Potreba za inteligentnom kontrolom
Ovaj članak je također dostupan:
Rosenberg Igor Naumovič
Inteligentna kontrola// Suvremene tehnologije upravljanja. ISSN 2226-9339
. — . Broj artikla: 7608. Datum objave: 2017-04-10. Način pristupa: https://site/article/7608/Uvod
Inteligentno upravljanje je generalizacija semiotičkog, kognitivnog i informacijskog upravljanja. U inteligentnom upravljanju transportom razlikuju se sljedeća područja: inteligentni transportni sustavi, inteligentno semiotičko upravljanje i inteligentno kognitivno upravljanje. Inteligentna semiotička kontrola povezana je s različitim oblicima logike, sustavom proizvoda i evolucijskim algoritmima. Inteligentno kognitivno upravljanje smatra se sintezom upravljanja ljudskim računalom korištenjem asocijativnih kanala i analize prešutnog znanja. Inteligentno upravljanje smatra se sredstvom donošenja odluka u uvjetima neizvjesnosti. Inteligentno upravljanje informacijama smatra se podrškom inteligentnom upravljanju putem informacijske tehnologije.
Potreba za inteligentnom kontrolom
Kako se društvo razvijalo, a objekti i zadaci upravljanja postajali sve složeniji, mijenjale su se i tehnologije upravljanja. Problem “velikih podataka” postao je najakutniji u upravljanju složenim situacijama. To stvara informacijsku barijeru za tehnologije "organizacijskog upravljanja". Suvremeni menadžment karakterizira porast loše strukturiranih informacija. To uzrokuje prijelaz na inteligentno upravljanje, što pak dovodi do potrebe za korištenjem tehnologija upravljanja znanjem. Osnova inteligentnog upravljanja su inteligentni sustavi i inteligentne tehnologije. Inteligentni sustav je tehnički ili programsko-hardverski sustav sposoban za dobivanje kreativnih rješenja problema iz određenog predmetnog područja, o čemu se znanje pohranjuje u memoriji takvog sustava. Pojednostavljeno rečeno, struktura inteligentnog sustava uključuje tri glavna bloka - bazu znanja, rješavač i inteligentno sučelje. Solver je dominantna komponenta inteligentnog sustava. U logici prvog reda, rješavač je mehanizam za dobivanje rješenja logičkih izraza. U višeagentnim sustavima, koji se klasificiraju kao umjetna inteligencija, također se koristi koncept rješavača. Agent je problem solver, koji je softverski entitet sposoban djelovati u interesu postizanja zadanih ciljeva. U simboličkom modeliranju, s-solver je vrijednost specijalizacije poruke. Efimov E.I. bio je jedan od prvih u Rusiji koji je uveo ovaj koncept. . Ovaj kratki popis pokazuje važnost rješavača za inteligentne sustave i inteligentne tehnologije.
Inteligentno upravljanje u okviru primijenjene semiotike
Semiotika proučava prirodu, vrste i funkcije znakova, znakovne sustave i ljudsku znakovnu aktivnost, znakovnu bit prirodnih i umjetnih jezika s ciljem izgradnje opće teorije znakova. U području semiotike postoji pravac “primijenjene semiotike” čiji je začetnik D.A. Pospelov.
U semiotici postoje dva područja primjene znakova: spoznaja i komunikacija. Ovo dijeli semiotiku na dva dijela: semiotiku znanja; semiotika semantičkih komunikacija. Osnova inteligentnog upravljanja je semiotički sustav. Prema Pospelovu, semiotički sustav W je uređena osmica skupova:
W=< T, R, A, P, τ, ρ, α, π>, (1)
Gdje
T - skup osnovnih simbola;
R - skup sintaktičkih pravila;
A - puno znanja o predmetnom području;
P je skup pravila za izvođenje rješenja (pragmatička pravila);
τ—pravila za promjenu skupa T;
ρ—pravila za promjenu skupa R;
α su pravila za promjenu skupa A;
π — pravila za promjenu skupa P.
Prva dva skupa generiraju jezik sustava W, i τ I ρ provesti njegovu promjenu. Pravila α promijeniti mnogo znanja o predmetnom području. Ako znanje promatramo kao aksiome formalnog sustava (koji se sastoji od prva četiri elementa od W), tada pravila α , bitno mijenjaju interpretaciju osnovnih simbola, a samim time i ispravno izgrađenih formula jezika semiotičkog sustava W.
Prva četiri skupa čine formalni sustav FS, elementi od pet do osam čine pravila za promjenu formalnog sustava. Time osiguravaju prilagodbu formalnog sustava, "prilagođavajući" ga za rješavanje zadataka i problema koji se u okviru sustava FS ne može se riješiti.
Stoga se semiotički sustav (1) može definirati kao složeni dinamički sustav: W=
Stoga se semiotičkom sustavu može dati nova interpretacija. Kompozitni dinamički sustav: W=
Pravila MFsi = (τ, ρ, α, π), oni koji mijenjaju stanje formalnog sustava (kontrolnog objekta) povezani su ovisnošću koja postoji u elementima semiotičkog trokuta (Fregeov trokut). To znači da primjena jednog od četiri pravila uzrokuje primjenu preostalih pravila.
Te su ovisnosti složene, nedostaje njihov analitički prikaz, a to je teško i predmet je istraživanja semiotičkih sustava umjetne inteligencije. Stoga je jednostavnije koristiti informacijski pristup i informacijsko modeliranje.
Proširenja formalnih sustava upravljanja u obliku dinamičkih komponenti MFsi osigurati svojstva otvorenosti sustava. Oni stvaraju mogućnost prilagodbe objekta upravljanja utjecajima upravljanja i promjenjivim vanjskim uvjetima.
To nam posebno omogućuje značajno proširenje mogućnosti podrške odlučivanju u uvjetima nesigurnosti, nepotpunosti i nekonzistentnosti početnih informacija.
Vrste nesigurnosti pri implementaciji inteligentnog upravljanja
Tradicionalne metode upravljanja, uključujući neke vrste inteligentnog upravljanja, temelje se na pretpostavci da modeli stanja i upravljanja objekta točno opisuju njegovo ponašanje. Metode temeljene na ovoj pretpostavci uključene su u klasičnu teoriju upravljanja. Međutim, u uvjetima povećanja obujma, porasta nestrukturiranih informacija i utjecaja vanjskog okruženja, karakteristična su odstupanja od ovog stanja.
Gotovo svaki model je pojednostavljeni opis stvarnog objekta, njegovog stanja i ponašanja. Stupanj pojednostavljenja može biti prihvatljiv ili stvoriti nesigurnost. U dinamici ponašanja upravljačkog objekta, neke karakteristike objekta mogu se značajno promijeniti tijekom njegovog rada. Sve to stvara nesigurnosti u različitim modelima opisa objekta i otežava upravljanje njime, uključujući i intelektualno upravljanje. Tipični kontrolni model na kojem se temelji kontrolni algoritam ili skup uspostavljenih kontrolnih pravila naziva se nominalni.
U uvjetima značajne nesigurnosti, klasične metode teorije upravljanja su neprimjenjive ili daju nezadovoljavajuće rezultate. U tim slučajevima potrebno je koristiti posebne metode analize i sinteze sustava upravljanja za objekte s nesigurnim modelima. Prvi korak je procijeniti vrstu i vrijednost nesigurnosti.
Postoje glavne vrste nesigurnosti u modelima upravljanja: parametarske, funkcionalne, strukturne i signalne.
Parametarska nesigurnost znači da su konstantni parametri modela nepoznati ili neprecizno određeni. Na primjer, umjesto bodovnih vrijednosti, postoje intervalne vrijednosti. Pri prijelazu na informacijsko-mjerne sustave možemo govoriti o nedostatku informacijske sigurnosti parametara. Stoga se u mnogim slučajevima stvarne vrijednosti parametara mogu značajno razlikovati od prihvaćenih nominalnih.
Nesigurnost signala znači da su radnje upravljanja ili tokovi informacija u sustavu upravljanja pod utjecajem smetnji koje značajno mijenjaju nazivne signale. Takvi signali koji odstupaju proces upravljanja od nominalnog nazivaju se smetnjama ili smetnjama. Razlika je u tome što je smetnja pasivna i mijenja samo omjer signala i šuma. Smetnja mijenja signal istom interferencijom.
Suvremeni inteligentni sustavi upravljanja moraju osigurati autonomni rad mnogih povezanih tehničkih objekata. To daje temelj govoriti o inteligentnom sustavu upravljanja (ICS). Inteligentni sustav mora rješavati složene probleme, uključujući planiranje, postavljanje ciljeva, predviđanje itd. Za svestranost, prilagodljivost i točnost rješenja preporučljivo je koristiti višenamjensko inteligentno upravljanje.
Višerazinska arhitektura inteligentnog upravljačkog sustava sastoji se od tri razine: konceptualne, informacijske i operativne (slika 1). Sustav izgrađen na ovoj arhitekturi kontrolira ponašanje složenih tehničkih objekata u uvjetima autonomne i kolektivne interakcije. Konceptualna razina odgovorna je za provedbu viših intelektualnih funkcija
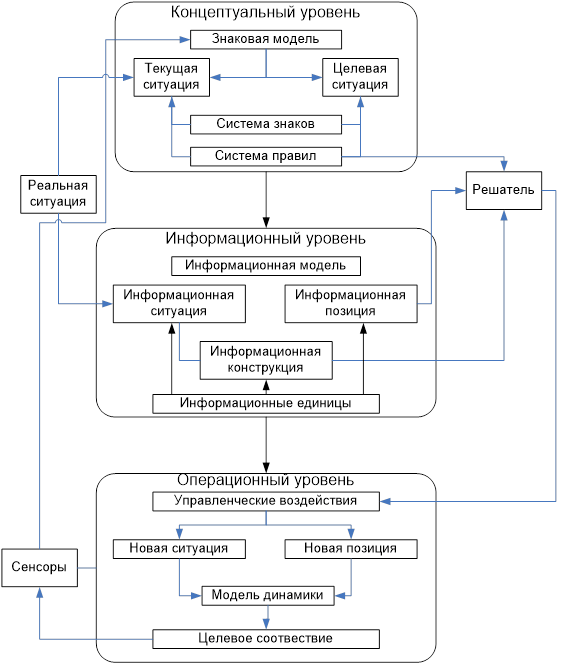
Sl. 1. Inteligentna kontrola na više razina.
Na konceptualnoj razini koristi se semiotički (znakovni) prikaz znanja i razmjenjuju se poruke s ostalim razinama. Informacijska i operativna razina sadrže module koji podržavaju različite intelektualne i informacijske postupke i pretvaraju ih u upravljanje.
Glavna zadaća menadžmenta na pojmovnoj razini je pohranjivanje, stjecanje i korištenje pojmovnog znanja predstavljenog u semiotičkom (simboličkom) obliku.
Kompozitni dinamički sustav: W=
Stjecanje znanja temelji se na modelu stvarnog stanja u vanjskom okruženju. Najviše intelektualne funkcije uključuju funkcije postavljanja glavnog cilja i podciljeva, planiranja ponašanja i raspodjele utjecaja u općem planu djelovanja.
Na razini upravljanja informacijama rješavaju se problemi modeliranja informacija, od kojih su glavni: konstrukcija informacijske situacije, informacijska pozicija, koja odgovara komponenti FSi. Na razini upravljanja informacijama rješavaju se zadaće izgradnje informacijske strukture koja je odraz sustava pravila na konceptualnoj razini i odgovara komponenti Mfsi. Jezično okruženje semiotičke kontrole na informacijskoj razini ostvaruje se uporabom različitih informacijskih jedinica. Koji služe kao osnova za konstruiranje informacijske situacije, informacijske pozicije i informacijskog dizajna.
Na operativnoj (izvršnoj) razini provode se upravljačke odluke (menadžerski utjecaji). Upravljački utjecaji nužno mijenjaju informacijsku poziciju objekta upravljanja. Upravljački utjecaji mogu promijeniti, ako je potrebno, informacijsku situaciju objekta upravljanja. Pritom najčešće nema potrebe mijenjati informacijsku situaciju. Glavna zadaća ove razine je promjena stanja i položaja upravljačkog objekta i dojava promjena na konceptualnoj razini.
Višerazinska arhitektura ima niz značajki. Uključuje brojne ljudske kognitivne funkcije. Temelji se na korištenju informacijskog pristupa inteligentnom upravljanju.
Vrijedno je uočiti razliku između intelektualnih i informacijskih tehnologija. Informacijske tehnologije obavljaju funkcije podrške inteligentnom upravljanju. Glavnu ulogu igraju tehnologije inteligentnog odlučivanja. Omogućuju, uz odluku ili u postupku dobivanja odluke, traženje novih znanja i akumulaciju intelektualnih resursa. Informacijske tehnologije stvaraju samo informacijske resurse. To znači da znanje formalizirano u eksplicitnom obliku, nakon što ga se savlada, može postati dio iskustva i baze znanja i koristiti ga za rješavanje problema i donošenje odluka.
Zaključak
Inteligentno upravljanje učinkovito je i potrebno pri upravljanju složenim objektima za koje je teško ili nemoguće pronaći formalne modele rada. Osnova inteligentnog upravljanja su prije svega semiotički modeli, a zatim informacijski modeli. Inteligentne metode upravljanja su raznolike i primjenjive na tehničke, kognitivne i transportne sustave. Inteligentno upravljanje široko se primjenjuje na višenamjensko upravljanje. Moderno inteligentno upravljanje integrira se u platforme i usluge u oblaku. Pri upravljanju distribuiranim organizacijama i korporacijama potrebno je voditi računa o prostornim odnosima i prostornom znanju. Drugi problem je ograničen broj inteligentnih tehnologija za rad s prešutnim znanjem. Tehnički, problem upravljanja znanjem vezan je za transformaciju informacijskih resursa u intelektualne resurse i njihovu primjenu u inteligentnim tehnologijama.
Bibliografija
- Pospelov D.A. Primijenjena semiotika i umjetna inteligencija // Programski proizvodi i sustavi. – 1996. – br.3. – C.10-13
- Tsvetkov V.Ya. Kognitivna kontrola. Monografija - M.: MAKS Press, 2017. - 72 str. ISBN 978-5-317-05434-2
- Tsvetkov V.Ya. Upravljanje informacijama. — LAP LAMBERT Academic Publishing GmbH & Co. KG, Saarbrücken, Njemačka 2012. -201s
- Osipov G.S. Od situacijskog upravljanja do primijenjene semiotike. Vijesti o umjetnoj inteligenciji. 2002., broj 6.
- Nikiforov V. O., Slita O. V., Ušakov A. V. Inteligentno upravljanje u uvjetima nesigurnosti. - St. Petersburg: St. Petersburg State University ITMO, 2011.
- McAfee A., Brynjolfsson E. Big data: the management revolution //Harvard business review. – 2012. – Br. 90. – str. 60-6, 68, 128.
- Tsvetkov V.Ya Markelov V.M., Romanov I.A. Prevladavanje informacijskih barijera // Učenje na daljinu i virtualno. 2012. br. 11. str. 4-7.
- Forbes L. S., Kaiser G. W. Izbor staništa u uzgoju morskih ptica: kada prijeći informacijsku barijeru //Oikos. – 1994. – Str. 377-384.
- Tsvetkov V. Ya. Inteligentna tehnologija upravljanja. // Russian Journal of Sociology, 2015, Vol. (2), Is. 2.-str.97-104. DOI: 10.13187/rjs.2015.2.97 www.ejournal32.com.
- Zilouchian A., Jamshidi M. Inteligentni sustavi upravljanja koji koriste metodologije mekog računanja. – CRC Press, Inc., 2000
- Alavi M., Leidner D. E. Recenzija: Upravljanje znanjem i sustavi upravljanja znanjem: Konceptualni temelji i istraživačka pitanja //MIS kvartalno. – 2001. – str.107-136.
- Pospelov D.A. Modeliranje rasuđivanja. Iskustvo u analizi mentalnih radnji. - M.: Radio i veze, 1989. -184c.
- De Moura L., Bjørner N. Z3: Učinkovit SMT rješavač //Alati i algoritmi za konstrukciju i analizu sustava. – Springer Berlin Heidelberg, 2008. – str. 337-340.
- Rosenberg I.N., Tsvetkov V.Ya. Primjena multiagentskih sustava u inteligentnim logističkim sustavima. // International Journal of Experimental Education. – 2012. – br.6. – str.107-109
- Efimov E.I. Rješivač intelektualnih problema - M.: Nauka, Glavna redakcija fizičke i matematičke literature, 1982. - 320 str.
- Pospelov D.A., Osipov G.S. Primijenjena semiotika // Vijesti o umjetnoj inteligenciji. - 1999. - br.1.
- Tsvetkov V.Ya. Informacijska nesigurnost i izvjesnost u informacijskim znanostima // Informacijske tehnologije. - 2015. - br.1. -str.3-7
- Tsvetkov V. Ya. Dihotomska procjena informacijskih situacija i informacijske superiornosti // European researcher. Niz A. 2014, Vol.(86), Br. 11-1, str.1901-1909. DOI: 10.13187/er.2014.86.1901
- Tsvetkov V. Ya. Informacijska situacija i informacijska pozicija kao alat upravljanja // European researcher. Serija A. 2012, Vol.(36), 12-1, str.2166- 2170
- Tsvetkov V. Ya. Informacijske konstrukcije // European Journal of Technology and Design. -2014, Vol (5), br. 3. - str.147-152
- 22. Pospelov D.A. Semiotički modeli: uspjesi i izgledi // Cybernetics. – 1976. – br.6. – Str.114-123.
- 23. Pospelov D.A. Semiotički modeli u menadžmentu. Kibernetika. Praktična pitanja. - M.: Nauka, 1984. – P.70-87
- Osipov G. S. i dr. Inteligentno upravljanje vozilima: standardi, projekti, implementacije // Aerospace instrumentation. – 2009. – Br. 6. – str. 34-43.
- Snytyuk V. E., Yurchenko K. N. Inteligentno upravljanje procjenom znanja // VE Snytyuk, KN Yurchenko. − Cherkassy. – 2013. godine.
- Pugachev I. N., Markelov G. Ya. Inteligentno upravljanje gradskim prometnim sustavima // Transport i usluge: zbirka. znanstveni djela.–Kaliningrad: Izdavačka kuća nazvana po I. Kantu. – 2014. – Br. 2. – str. 58-66.
- Atiencia V., Diveev A.I. Sinteza inteligentnog višenamjenskog upravljačkog sustava // Suvremeni problemi znanosti i obrazovanja. – 2012. – Br. 6.
- Gribova V. V. et al. Cloud platforma za razvoj i upravljanje inteligentnim sustavima // Međunarodna znanstveno-tehnička konferencija “Otvorene semantičke tehnologije za dizajn inteligentnih sustava” (OSTIS-2011).-Minsk: BSUIR. – 2011. – S. 5-14.
TEMA 13. INTELIGENTNI SUSTAVI UPRAVLJANJA
Nova generacija sustava - inteligentni sustavi (IS) - oživjela je druga načela organiziranja komponenti sustava, pojavili su se novi koncepti, termini i blokovi koji se do sada nisu susreli u razvoju, a time ni u znanstvenoj literaturi.
Inteligentni sustavi sposobni su sintetizirati cilj, donijeti odluku o djelovanju, osigurati akciju za postizanje cilja, predvidjeti vrijednosti parametara rezultata akcije i usporediti ih sa stvarnim, formirati povratnu informaciju, prilagoditi cilj ili kontrolirati
Slika 13.1 prikazuje blok dijagram IS-a, gdje su istaknuta dva velika bloka sustava: sinteza cilja i njegova implementacija.
U prvom bloku, na temelju aktivne procjene informacija primljenih od senzorskog sustava, uz prisutnost motivacije i znanja, sintetizira se cilj i donosi odluka o akciji. Aktivna procjena informacija provodi se pod utjecajem okidačkih signala. Varijabilnost okoline i vlastitog stanja sustava može dovesti do potrebe za nečim (motivacija), a uz dostupnost znanja može se sintetizirati cilj.
Cilj se shvaća kao idealna, mentalna anticipacija rezultata neke aktivnosti. Nastavljajući aktivno procjenjivati informacije o okruženju i vlastitom stanju sustava, uključujući objekt upravljanja, uspoređujući opcije za postizanje cilja, možete donijeti odluku o poduzimanju akcije.
Nadalje, u drugom bloku dinamički ekspertni sustav (DES) na temelju trenutnih informacija o okruženju i vlastitom stanju IS-a, uz postojanje cilja i znanja, provodi ekspertnu procjenu, donosi odluku o upravljanju. , predviđa rezultate djelovanja i razvija upravljanje.
Kontrola predstavljena u kodiranom obliku pretvara se u fizički signal i šalje aktuatorima.
Upravljački objekt, primajući signal od aktuatora, provodi jednu ili drugu akciju, čiji se rezultati, predstavljeni u obliku parametara, šalju u dizelsku elektranu preko povratnog kruga 2, gdje se uspoređuju s predviđenim . Istodobno, parametri rezultata radnje, interpretirani u skladu sa svojstvima cilja i ulazeći u blok I, mogu se koristiti za emocionalnu procjenu postignutog rezultata: npr. cilj je postignut, ali rezultat se ne sviđa.
Ako je cilj postignut u svim aspektima, tada se pojačava upravljanje. U suprotnom dolazi do korekcije kontrole. Kada je cilj nedostižan, cilj se prilagođava.
Treba napomenuti da je kod naglih promjena stanja okoline, ili objekta upravljanja, ili sustava u cjelini, moguće sintetizirati novi cilj i organizirati njegovo postizanje.
Struktura IS-a, uz nove elemente, sadrži tradicionalne elemente i veze, a središnje mjesto u njoj zauzima dinamički ekspertni sustav.
Blok 1 - sinteza cilja Blok II - provedba cilja
Slika 13.1 – IC blok dijagram
Formalno, IS je opisan sa sljedećih šest izraza:
T x S M T ;
T M S ST ;
C T S R T;
T x= (A T)X T+(B T)U T;
T Y = (D T)X T;
T R Y S T ,
gdje je T skup trenutaka u vremenu;
X, S, M, C, R i Y - skupovi stanja sustava, okruženja, motivacije, cilja, predviđenog i stvarnog rezultata;
A, B i D - matrice parametara;
Inteligentni operatori pretvorbe koji koriste znanje.
Ovaj opis kombinira prikaze objekata sustava u obliku skupa vrijednosti, ili skupa iskaza, ili nekih drugih oblika.
Dinamička svojstva IS-a mogu se opisati u prostoru stanja. Intelektualni operatori koji provode percepciju, reprezentaciju, oblikovanje pojmova, prosudbe i zaključke u procesu spoznaje formalno su sredstvo obrade informacija i znanja, kao i donošenja odluka. Svi ovi aspekti trebali bi činiti osnovu za izgradnju DES-a koji radi u stvarnom vremenu i stvarnom svijetu.
Dinamički ekspertni sustav složena je cjelina sposobna procjenjivati stanje sustava i okoline, uspoređivati parametre željenih i stvarnih rezultata djelovanja, donositi odluke i razvijati upravljanje koje doprinosi postizanju cilja. Da bi to učinio, DES mora imati zalihu znanja i metode za rješavanje problema. Znanje koje se prenosi u ekspertni sustav može se podijeliti u tri kategorije:
1) konceptualno (na razini pojmova) znanje je znanje utjelovljeno u riječima ljudskog govora ili, konkretnije, u znanstvenim i tehničkim terminima i, naravno, u klasama i svojstvima objekata okoliša iza tih pojmova. To također uključuje veze, odnose i ovisnosti između pojmova i njihovih svojstava, apstraktne veze također izražene riječima i terminima. Pojmovno znanje područje je uglavnom fundamentalnih znanosti, budući da je pojam najviši proizvod najvišeg proizvoda materije – mozga;
2) činjenično, predmetno znanje je skup informacija o kvalitativnim i kvantitativnim karakteristikama određenih objekata. Upravo uz ovu kategoriju znanja povezuju se pojmovi “informacije” i “podaci”, iako ovakva uporaba ovih pojmova donekle omalovažava njihovo značenje. Svako znanje nosi informaciju i može se prikazati u obliku podataka; činjenično znanje ono je čime su se računalni strojevi oduvijek bavili i čime se još uvijek najviše bave. Suvremeni oblik prikupljanja podataka obično se naziva bazama podataka. Naravno, za organiziranje baza podataka i traženje potrebnih informacija u njima potrebno je osloniti se na konceptualno znanje;
3) algoritamsko, proceduralno znanje - to je ono što se obično naziva riječima "vještina", "tehnologija" itd. U računarstvu se algoritamsko znanje implementira u obliku algoritama, programa i potprograma, ali ne svih, već onih koji se mogu prenositi iz ruke u ruku i koristiti bez sudjelovanja autora. Ova implementacija algoritamskog znanja naziva se softverski proizvod. Najčešći oblici programskih proizvoda su aplikacijski softverski paketi, programski sustavi i drugi usmjereni na određeno područje primjene DES-a. Organizacija i korištenje aplikativnih programskih paketa temelji se na konceptualnom znanju.
Jasno je da je konceptualno znanje viša, definirajuća kategorija znanja, iako se, s praktičnog gledišta, druge kategorije mogu činiti važnijima.
To je vjerojatno razlog zašto je konceptualno znanje rijetko utjelovljeno u obliku koji se može obraditi računalima. I ako je utjelovljena, najčešće je nepotpuna i jednostrana. U većini slučajeva osoba ostaje nositelj pojmovnog znanja. To usporava automatizaciju mnogih procesa.
Prikazi konceptualnog znanja, točnije sustavi koji implementiraju sve tri kategorije znanja, ali u prvi plan ističu konceptualno znanje i rade na temelju njegove intenzivne upotrebe, nazivaju se bazama znanja.
Stvaranje i široka uporaba baza znanja u informacijskim sustavima jedan je od najhitnijih zadataka. Konceptualni dio baze znanja nazvat ćemo model domene, algoritamski dio programski sustav, a činjenični dio baza podataka.
Sljedeća funkcija DES-a je rješavanje problema. Problem može riješiti stroj samo ako je formalno postavljen - ako je za njega napisana formalna specifikacija. Potonji se mora oslanjati na neku bazu znanja. Model domene opisuje opće okruženje u kojem je zadatak nastao, a specifikacija opisuje sadržaj zadatka. Uzeti zajedno, oni omogućuju utvrđivanje koje apstraktne veze i ovisnosti, u kojim kombinacijama i kojim redoslijedom treba koristiti za rješavanje problema.
Aplikacijski programi pružaju specifične alate iza ovih ovisnosti i također sadrže algoritme za rješavanje rezultirajućih jednadžbi. Konačno, baza podataka daje sve ili dio ulaznih podataka za izvođenje ovih algoritama; podaci koji nedostaju moraju biti sadržani u specifikaciji.
Ova tri dijela baze znanja odgovaraju trima fazama rješavanja problema:
1) izrada apstraktnog programa rješenja (uključujući pojavu problema, njegovu formulaciju i specifikaciju);
2) prijevod problema na odgovarajući strojni jezik;
3) emitiranje i izvođenje programa.
Konstrukcija apstraktnog programa povezana je s reprezentacijom i obradom konceptualnog znanja u IS-u i, po definiciji, vlasništvo je umjetne inteligencije.
Umjetna inteligencija povezana je s obradom tekstova, usmenih poruka na prirodnom jeziku, s analizom i obradom informacija (prepoznavanje svih vrsta slika, dokazivanje teorema, logičko zaključivanje itd.).
Funkcije DES-a su i procjena rezultata rješavanja problema, formiranje parametara za budući rezultat akcije, donošenje odluka o upravljanju, razvoj upravljanja i usporedba parametara željenih i stvarnih rezultata. To uključuje modeliranje procesa za procjenu mogućih posljedica i ispravnosti rješenja problema.
Imajte na umu da u stvarnim slučajevima postoji problem opisivanja objekata koji se proučavaju. Takav se opis s pravom ne smatra dijelom specifikacije zadatka, budući da se u pravilu mnogo zadataka postavlja u vezi s jednim objektom, što se, naravno, mora uzeti u obzir pri formiranju baze znanja. Osim toga, može se pokazati da se problem koji je nastao ne može potpuno automatski riješiti, na primjer, zbog nepotpunosti specifikacije ili opisa objekta.
Stoga je u IS-u u određenim fazama preporučljivo imati interaktivni način rada s DES-om. Moramo imati na umu da model domene opisuje opću situaciju (znanje), a specifikacija sadržaj zadatka. Vrlo važni problemi su stvaranje unificiranog programskog okruženja i sinteza algoritama izravno na temelju problema.
Ovisno o cilju pred kojim se IS nalazi, baza znanja, algoritmi za rješavanje problema, donošenje odluke i razvoj upravljanja mogu, naravno, imati različitu zastupljenost, što pak ovisi o prirodi rješavanja problema. Sukladno tome, mogu se uočiti tri vrste DES-a. Struktura DES-a prvog tipa prikazana je na slici 13.2.

Slika 13.2 – Struktura DES-a prvog tipa
Ovdje se pretpostavlja da pojmovno i činjenično znanje točno odražavaju procese i informacije vezane uz određeno predmetno područje.
Tada će se na temelju rigoroznih matematičkih metoda, u skladu s formulacijom i specifikacijom, dobiti rješenje problema koji nastaje u ovom području. Rezultati studije odluke i prognoze koriste se za dobivanje stručne ocjene i donošenje odluke o potrebi upravljanja. Zatim se na temelju prikladnog upravljačkog algoritma dostupnog u bazi znanja generira upravljačka akcija.
Učinkovitost i dosljednost ovog utjecaja, prije nego što stigne do objekta upravljanja, procjenjuje se pomoću matematičkog modela simulacije. Evaluacija se mora provesti brže od stvarnih procesa u IS-u.
Međutim, DES koji implementiraju odlučivanje složeni su softverski sustavi namijenjeni automatskom donošenju odluka ili kao pomoć donositeljima odluka, au operativnom upravljanju složenim sustavima i procesima u pravilu rade pod strogim vremenskim ograničenjima.
Za razliku od DES-a prvog tipa, osmišljenog za pronalaženje optimalnog rješenja i temeljenog na strogim matematičkim metodama i modelima optimizacije, DES drugog tipa uglavnom su usmjereni na rješavanje problema koje je teško formalizirati u nedostatku potpunih i pouzdanih informacija (Sl. 13.3). . Ovdje se koriste ekspertni modeli izgrađeni na temelju znanja eksperata – specijalista za pojedino problemsko područje te heurističke metode za pronalaženje rješenja.
Jedan od glavnih problema pri projektiranju DES-a drugog tipa je izbor formalnog aparata za opisivanje procesa donošenja odluka i izgradnja na njegovoj osnovi modela donošenja odluka koji je adekvatan problemskom području (semantički ispravan). Kao takav uređaj obično se koriste proizvodni sustavi. Međutim, glavno istraživanje provodi se u kontekstu algoritamske (determinističke) interpretacije proizvodnog sustava s njemu svojstvenom sekvencijalnom shemom pronalaženja rješenja.
Dobiveni modeli često su neadekvatni stvarnim problematičnim područjima koje karakterizira nedeterminizam u procesu pronalaženja rješenja. Izlaz iz ove situacije je paralelizam u potrazi.
U stvarnosti, treba se usredotočiti na kombiniranje DES-a prvog i drugog tipa u računsko-logički DES trećeg tipa, gdje baza znanja kombinira opis u obliku strogih matematičkih formula sa stručnim informacijama, a također, sukladno tome, matematičke metode pronalaženja rješenja nerigoroznim heurističkim metodama, pri čemu je težina jedne ili druge komponente određena mogućnošću adekvatnog opisa predmetnog područja i metode pronalaženja rješenja (sl. 13.4).

Slika 13.3 – Struktura dizel elektrane druge razine
Prilikom razvoja DES-a javljaju se sljedeći problemi:
1. određivanje sastava baze znanja i njezino formiranje;
2. razvoj novih i korištenje poznatih teorija i metoda za opisivanje informacijskih procesa u informacijskim sustavima;
3. razvoj načina prezentiranja i organizacije korištenja znanja;
4. razvoj algoritama i softvera uz paralelizaciju i korištenje “fleksibilne logike”;
- pronalaženje prikladnih računalnih okruženja za implementaciju paralelnih algoritama u formiranju DES-a.

Slika 13.4 – Struktura dizel elektrane treće razine
Uz navedeno, važno je napomenuti da DES mora imati sposobnost prilagodbe dinamičnom problemskom području, sposobnost uvođenja novih elemenata i veza u opis situacije, mijenjanje pravila i strategija funkcioniranja objekata u proces donošenja odluka i razvoja upravljanja, rad s nepotpunim, nejasnim i proturječnim informacijama i sl.
Dinamički ekspertni sustavi djeluju u sklopu IS-a koji imaju povratnu spregu te je stoga važno osigurati stabilan rad takvih IS-ova.
S tradicionalnog gledišta, možemo pretpostaviti da trajanje reakcije dizel elektrane na ulazne utjecaje, tj. vrijeme potrošeno na obradu ulaznih informacija i razvoj kontrolne radnje je čisto kašnjenje. Na temelju frekvencijske analize moguće je procijeniti promjenu faznih svojstava sustava i time odrediti granicu stabilnosti. Ako je potrebno, možete ispraviti sustav pomoću filtara.
Međutim, sa stajališta klasične teorije upravljanja, IS su višeobjektni, višepovezani sustavi čija je analiza stabilnosti konvencionalnim metodama vrlo teška.
Trenutno je teorija robusnog upravljanja (-teorija upravljanja, -kontrola) jedna od grana teorije upravljanja koja se intenzivno razvija. Relativno mlad (prvi radovi pojavili su se ranih 80-ih), proizašao je iz hitnih praktičnih problema sinteze višedimenzionalnih linearnih sustava upravljanja koji rade u uvjetima različitih vrsta poremećaja i promjena parametara.
Problemu dizajniranja upravljanja stvarno složenim objektom koji radi u uvjetima neizvjesnosti možete pristupiti na drugačiji način: ne pokušavajte koristiti jednu vrstu upravljanja - adaptivnu ili robusnu. Očito treba izabrati onaj tip koji odgovara stanju okoline i sustava, određenom iz informacija kojima sustav raspolaže. Ukoliko je tijekom rada sustava moguće organizirati primanje informacija, preporučljivo ga je koristiti u procesu upravljanja.
No donedavno je implementacija takvog kombiniranog upravljanja nailazila na nepremostive poteškoće u određivanju algoritma za izbor vrste upravljanja. Napredak postignut u razvoju problema umjetne inteligencije omogućuje sintezu takvog algoritma.
Doista, postavimo zadatak: dizajnirati sustav koji koristi prilagodljivo i robusno upravljanje i odabire vrstu upravljanja na temelju metoda umjetne inteligencije. Da bismo to učinili, razmotrit ćemo značajke obje vrste i, uzimajući u obzir njihove specifične kvalitete, odredit ćemo kako izgraditi kombinirani sustav upravljanja.
Jedan od glavnih pojmova u teoriji robusnog upravljanja je koncept nesigurnosti. Nesigurnost objekta odražava netočnost modela objekta, kako parametarsku tako i strukturnu.
Razmotrimo detaljnije oblike specificiranja nesigurnosti u robusnoj teoriji upravljanja pomoću jednostavnog sustava - s jednim ulazom i jednim izlazom (slika 13.5).
Signali imaju sljedeću interpretaciju: r - glavni ulazni signal; u - ulazni signal (ulaz) objekta; d - vanjska smetnja; y je izlazni signal (izlaz) objekta koji se mjeri.

Slika 13.5 – Sustav s jednim ulazom i jednim izlazom
U teoriji upravljanja, nesigurnost je prikladno specificirana u frekvencijskoj domeni. Pretpostavimo da je prijenosna funkcija normalnog objekta P i razmotrimo poremećeni objekt čija je prijenosna funkcija
|
|
gdje je W fiksna prijenosna funkcija (težinska funkcija);
–proizvoljna stabilna prijenosna funkcija koja zadovoljava nejednakost .
Takav poremećaj nazvat ćemo dopuštenim. Ispod su neke opcije za modele nesigurnosti:
| (1+W)P; P+W; P/(1+WP); P/(1+W). |
U svakom slučaju moraju se napraviti odgovarajuće pretpostavke za količine i W.
Nesigurnost ulaznih signala d odražava različitu prirodu vanjskih smetnji koje djeluju na objekt i regulator. Neodređeni objekt se stoga može smatrati skupom objekata.
Izaberimo određenu karakteristiku sustava povratne sprege, na primjer stabilnost. Regulator C je robustan s obzirom na ovu karakteristiku ako je ima bilo koji od skupa objekata definiranih nesigurnošću.
Dakle, koncept robusnosti podrazumijeva prisutnost regulatora, skupa objekata i fiksiranje određene karakteristike sustava.
U ovom radu nećemo se doticati cijelog niza problema koji se rješavaju u okviru teorije upravljanja. Dotaknimo se samo problema minimalne osjetljivosti: konstrukcija regulatora C koji stabilizira zatvoreni sustav i minimizira utjecaj vanjskih smetnji na izlaz y, drugim riječima, minimizira normu matrice prijenosnih funkcija s vanjskih poremećaja na izlaz y. .
Jedna od značajki rješavanja ovog, ali i čitavog skupa problema robusnog upravljanja, jest činjenica da unaprijed, u procesu projektiranja regulatora, postavljamo ograničenja na ulazne utjecaje i nesigurnost objekta u obliku nejednakosti.
Tijekom rada robusnog sustava informacije o nesigurnostima u sustavu ne koriste se za upravljanje.
Naravno, to dovodi do činjenice da su robusni sustavi konzervativni i da kvaliteta prijelaznih procesa ponekad ne zadovoljava programere tih sustava.
Poput robusnog adaptivnog upravljačkog sustava, izgrađen je za objekte, informacije o kojima ili o utjecajima na koje nisu dostupne na početku rada sustava. Svojstvo prilagodbe najčešće se postiže formiranjem, eksplicitno ili implicitno, matematičkog modela objekta ili ulaznog utjecaja.
Ovo razlikuje adaptivno upravljanje pretraživanjem, koje se temelji na traženju i zadržavanju ekstrema indikatora kvalitete upravljanja, i ne-pretraživanje, koje se temelji na kompenzaciji za odstupanje stvarnih promjena u kontroliranim koordinatama od željenih promjena koje odgovaraju potrebna razina pokazatelja kvalitete. Zatim, prema dorađenom modelu, podešava se adaptivni regulator.
Stoga je glavna značajka adaptivnih sustava upravljanja sposobnost dobivanja informacija tijekom rada i korištenja tih informacija za upravljanje.
Štoviše, adaptivni sustavi uvijek koriste apriorne informacije o nesigurnosti u sustavu. To je temeljna razlika između adaptivnog i robusnog pristupa.
Razmotrimo najjednostavniji adaptivni sustav upravljanja koji omogućuje praćenje ulaznog signala u prisutnosti šuma na ulazu objekta (slika 13.6).

Crtanje. 13.6–Adaptivni sustav upravljanja
Formalna razlika u odnosu na sklop na slici 13.5 je adaptacijski blok A koji na temelju izlaznog signala objekta i signala koji karakterizira zadanu kvalitetu generira signal za podešavanje koeficijenata adaptivnog regulatora.
Imajući u vidu nedostatke svakog od regulatora, preporučljivo je pokušati iskoristiti njihove prednosti predlažući kombiniranu shemu za upravljanje objektom. Prilagodljivi sustav pomoću bloka prilagodbe generira neke informacije o stanju vanjske okoline. Konkretno, u slučaju koji se razmatra, moguće je dobiti informaciju o vanjskom poremećaju d. Upravljački algoritam C a odgovara trenutnom stanju vanjske okoline, prema kriteriju postavljenom u bloku prilagodbe. Ali adaptivni sustav zahtijeva da ulazni signal r ima prilično širok raspon frekvencija i nameće stroga ograničenja na vrijednost i frekvencijski spektar vanjskog signala smetnje d. Stoga adaptivni sustavi mogu djelovati samo u uskim rasponima ulaznog signala r i vanjskih smetnji d. Izvan ovih raspona, adaptivni sustav ima lošu kvalitetu upravljanja i može čak izgubiti stabilnost.
Gore razmotrena svojstva robusne i adaptivne kontrole dovode do zaključka da je tijekom rada sustava u nekim slučajevima korisno koristiti robusnu kontrolu, u drugima - prilagodljivu, tj. moći kombinirati kontrolu ovisno o stanju vanjskog okruženja.
Kombinirana kontrola. Glavno pitanje pri projektiranju kombiniranih sustava upravljanja je kako, na temelju kojeg znanja (informacija) odabrati jednu ili drugu vrstu upravljanja.
Najveće mogućnosti za to pružaju metode umjetne inteligencije. Njihova prednost u odnosu na jednostavne komutacijske algoritme je korištenje širokog spektra podataka i znanja za formiranje algoritma za odabir vrste upravljanja.
Ako formalno spojimo krugove prikazane na slikama 13.5, 13.6, dobit ćemo kombinirani upravljački krug (slika 13.7).
Kao što je vidljivo sa slike, upravljački signal mora prelaziti s robusnog regulatora na adaptivni i obrnuto - kako se mijenja okolina tijekom rada sustava. Metodama teorije inteligentnih sustava moguće je osigurati prijelaz s jedne vrste upravljanja na drugu ovisno o uvjetima rada sustava.
|
|

Slika 13.6 – Kombinirana shema upravljanja
Prvo razmotrimo koje se informacije mogu koristiti za rad inteligentne jedinice sustava. Kao što je poznato, sustavi s jednim ulazom i jednim izlazom dobro su opisani u frekvencijskoj domeni. Stoga je prirodno koristiti frekvencijske karakteristike za organizaciju procesa odlučivanja pri odabiru vrste upravljanja.
Kao što je gore spomenuto, frekvencijski odziv sustava s robusnom regulacijom odgovara najgoroj kombinaciji parametara u području nesigurnosti. Stoga se robusna kontrola može uzeti kao jedna od granica odabrane kontrole.
Drugo ograničenje određeno je mogućnostima sustava koji se proučava (brzina pogona, napajanje itd.). Između ove dvije granice nalazi se područje u kojem ima smisla koristiti adaptivnu kontrolu.
|
|

Slika 13.7 – Kombinirana shema upravljanja
Budući da je adaptivni algoritam osjetljiv na početnu fazu rada sustava, u ovoj fazi preporučljivo je koristiti robusnu kontrolu, koja je prilično neosjetljiva na brzinu promjene vanjskih smetnji. Ali njegov nedostatak je dugo trajanje prijelaznih procesa i velike dopuštene vrijednosti izlazne koordinate pod utjecajem smetnji.
Nakon nekog vremena ima smisla prebaciti se s robusne kontrole na prilagodljivu kontrolu.
Adaptivno upravljanje omogućuje točnije praćenje ulaznog signala u prisutnosti informacija o smetnjama. Adaptivno upravljanje zahtijeva bogatstvo spektra ulaznog signala i, na primjer, kod signala koji se sporo mijenjaju procesi prilagodbe mogu zakazati ili biti jako usporeni. U takvoj situaciji potrebno je ponovno prijeći na robusnu regulaciju koja jamči stabilnost sustava.
Iz navedenog proizlazi da je za rad sustava nužna informacija o frekvencijskom spektru signala korisne smetnje i omjeru signal/šum.
Osim toga, potrebne su preliminarne informacije o frekvencijskom spektru na kojem adaptivni sustav radi, te o posebnim karakteristikama upravljačkog objekta na granicama područja nesigurnosti. Iz tih podataka možete kreirati bazu podataka u koju se unaprijed unose podaci specifični za svaku klasu objekata. Podaci o frekvencijskom spektru korisnog signala, smetnjama i omjeru signal/šum ulaze u bazu tijekom rada sustava i stalno se ažuriraju.
Sadržaj baze podataka može se koristiti u bazi znanja koja je formirana u obliku pravila. Ovisno o specifičnim svojstvima sustava, možete postaviti prebacivanje između dvije vrste upravljanja. Tražena pravila formiraju se u jednom od logičkih sustava prikladnih za razmatrani slučaj.
Posjedujući baze podataka i znanje, moguće je razviti mehanizam donošenja odluka koji će osigurati točan izbor tipa upravljanja ovisno o uvjetima rada sustava.
|
|

Slika 13.8 – Blok dijagram sustava s inteligentnom jedinicom (IB)
Inteligentni dio sustava radi diskretno, u određenim vremenskim intervalima. Na slici 13.8 prikazan je blok dijagram sustava s inteligentnom informacijskom sigurnosnom jedinicom koja omogućuje izbor tipa kontrole.
Na ulazu bloka prima se signal r i izmjereni, izlazni signal objekta y. U bloku predprocesiranja informacija BPOI, na temelju vremenskih karakteristika signala r(t), y(t), frekvencijskih karakteristika ulaznog signala r(w) i vanjskih smetnji d(w), relativni položaj spektra r(w) i d(w) i karakterističnih vrijednosti omjera signala i šuma r(w)/d(w). Sve ove informacije idu u bazu podataka. Blok odlučivanja BPR-a, koristeći generiranu bazu znanja i podatke baze podataka, razvija odluku u skladu s kojom se jednom od vrsta kontrola aktivira. U sljedećem intervalu proces se ponavlja s novim podacima.
UDC 004.896
I. A. Ščerbatov
INTELIGENTNO UPRAVLJANJE ROBOTSKIM SUSTAVIMA U UVJETIMA NESIGURNOSTI
Uvod
Inteligentno upravljanje je korištenje metoda umjetne inteligencije za upravljanje objektima različite fizičke prirode. U području upravljanja robotskim sustavima najviše se koriste metode umjetne inteligencije. To je, prije svega, zbog autonomije robota i njihove potrebe za rješavanjem neformalnih kreativnih problema u uvjetima nepotpunih informacija i raznih vrsta neizvjesnosti.
Sve donedavno, ova klasa zadataka ostala je prerogativ prirodne inteligencije: operatera upravljačkog objekta, inženjera, znanstvenika, tj. čovjeka. Suvremeni napredak u području teorije automatskog upravljanja, inteligentne metode za formalizaciju polustrukturiranih zadataka i upravljanje složenim tehničkim sustavima omogućuju implementaciju vrlo složenih robotskih sustava, koji uključuju mobilne robotske platforme, fleksibilne automatizirane linije i android robote.
Robotski sustavi rade u uvjetima nepotpunih ulaznih informacija, kada temeljna nemogućnost mjerenja niza parametara nameće značajna ograničenja upravljačkom programu. To dovodi do potrebe za razvojem baze algoritama koji omogućuju izračunavanje nemjerenih parametara na temelju neizravnih znakova i mjerljivih pokazatelja.
Nesigurnost vanjskog okruženja u kojem robotski sustav radi tjera upravljački sustav na uključivanje raznih vrsta kompenzatora, modula za prilagodbu, akumulaciju i rangiranje informacija.
Formulacija problema
Svrha istraživanja bila je razviti pristupe konstrukcije inteligentnih sustava upravljanja robotskim sustavima koji su invarijantni s obzirom na specifičnosti rada, uzimajući u obzir nepotpunost ulaznih informacija i različite vrste nesigurnosti.
Za postizanje ovog cilja potrebno je riješiti niz međusobno povezanih problema: analizirati arhitekture inteligentnih sustava upravljanja robotskim sustavima; razviti generalizirani algoritam za situacijsku identifikaciju robotskog sustava; izraditi generalizirani dijagram sustava upravljanja robotskim sustavom; razviti inteligentne upravljačke sustave za robota za rukovanje, mobilnu robotsku platformu i fleksibilnu automatiziranu liniju.
Metode istraživanja
Tijekom istraživanja korištene su metode opće teorije automatskog upravljanja, teorije neizrazitih skupova, neuronskih mreža, analize sustava i teorije ekspertnih procjena.
Položaj robotskog sustava u vanjskom okruženju
Za implementaciju inteligentnih algoritama upravljanja primarni zadatak je trenutna identifikacija situacije u kojoj se robotski sustav nalazi. Za rješavanje ovog problema razvijen je blok dijagram sustava situacijske identifikacije (slika 1).
Jedinica za tehnički vid i senzorsku senzorsku jedinicu namijenjena je utvrđivanju promjena u stanju vanjskog okoliša i predstavljanju senzorske karte okoliša za daljnju obradu. Senzorna mapa okoline je slika situacije u kojoj se robot nalazi u trenutnom trenutku vremena. Vremenski interval za izradu senzorne karte odabire se na temelju specifičnosti predmetnog područja.
Baza znanja
Operater
Intelektualac
sučelje
Identifikator
algoritmi
Organi tehničkog vida i osjeta
Vanjsko okruženje
Izvršni
mehanizmima
Riža. 1. Blok dijagram sustava situacijske identifikacije
Radna memorija, analogno ekspertnim sustavima, namijenjena je obradi informacija koje dolaze od senzora i obrađuju se pomoću postojeće baze algoritama i baze znanja (KB) robotskog sustava.
Baza algoritama uključuje algoritme za predprocesiranje senzorske mape (digitalna obrada signala, prepoznavanje zvučnih uzoraka i slika), izračun nemjerenih parametara (funkcionalne ovisnosti o mjerenim parametrima), vraćanje potpunosti informacija (provjera znanja na potpunost i nedosljednost, prilagodba znanja uzimajući u obzir nestacionarnost i promjenjive vanjske uvjete), matematičke operacije itd.
Baza znanja je složena hijerarhijska struktura koja sadrži apriorne informacije o vanjskom okruženju, postavljene u fazi obuke, cjelovito i dosljedno znanje koje je robot stekao u procesu funkcioniranja i percepcije vanjskog okruženja. Znanje u bazi znanja rangirano je prema kriterijima relevantnosti i ažurirano uzimajući u obzir promjene u specifičnostima funkcioniranja robota na temelju algoritama prilagodbe znanja.
Najvažniji blok je identifikator situacije. Upravo je taj blok odgovoran za ispravno prepoznavanje slike situacije na temelju senzorne karte. Rezultantne informacije ovog bloka odlučujuće su za odabir upravljačkog programa za robotski sustav.
I na kraju, inteligentno sučelje, koje je neophodno za komunikaciju s operaterom. Operater prati funkcioniranje robotskog sustava, kao i proces za postizanje postavljenih ciljeva. U pravilu, komunikacija između robota i operatera trebala bi se odvijati korištenjem sučelja prirodnog jezika u ograničenom podskupu prirodnog jezika.
Struktura sustava upravljanja robotskim sustavom u uvjetima nesigurnosti
Implementacija algoritama i programa za inteligentno upravljanje robotskim sustavima u uvjetima nesigurnosti povezana je s nizom značajnih poteškoća.
Složenost algoritama za pretprocesiranje ulaznih informacija i strukturna nesigurnost samog modela ponašanja robotskog sustava uvjetuju redundanciju strukture inteligentnog upravljačkog sustava.
Kako bi se riješio problem upravljanja robotom u uvjetima nesigurnosti, dizajnirana je sljedeća arhitektura inteligentnog upravljačkog sustava (slika 2).
Situacijski identifikacijski sustav (SIS) trebao bi biti dio svakog inteligentnog upravljačkog sustava za robotski sustav. Inteligentni upravljački uređaj (ICD) sadrži upravljačku jedinicu i jedinicu za odabir upravljačkog programa (CPSU). Svrha ovog bloka je razviti upravljačku akciju za sustav električnih pogona (ED) koji djeluju na mehanički sustav (MS) robota.
Riža. 2. Blok dijagram inteligentnog upravljačkog sustava za robotski sustav
Sustavi upravljanja industrijskim manipulatorima
Tradicionalni sustavi upravljanja industrijskim manipulatorima podijeljeni su u nekoliko klasa. Prva klasa sustava su sustavi programskog upravljanja.
Sustav kontinuiranog upravljanja radnim tijelom manipulatora uključuje usklađivanje manipulatora s referentnim modelom. U ovom algoritmu upravljanja gubici u manipulatoru MS nisu uzeti u obzir i pretpostavlja se da se sve sile koje razvijaju pogoni prenose na radni element.
Programabilni sustav upravljanja silom u radnom tijelu služi za upravljanje ne samo vektorom sile, već i vektorom položaja radnog tijela. Sustav neovisnog upravljanja kretanjem i silom u radnom tijelu manipulatora za različite stupnjeve pokretljivosti ima dvije regulacijske petlje s povratnom spregom: po položaju i po sili.
U sustavu spregnutog upravljanja kretanjem i silom u radnom tijelu manipulatora, zadatak za vektor položaja radnog tijela podešava se prema trenutnoj vrijednosti vektora sile. To znači da se pri kretanju radnog tijela veličina njegovog hoda podešava prema sili utjecaja na vanjsku okolinu.
Adaptivni sustavi upravljanja koriste se kada se izvode sljedeće operacije: podizanje proizvoljno lociranog ili pokretnog objekta, elektrolučno zavarivanje šavova s promjenjivim položajem, izbjegavanje pokretnih i neočekivanih prepreka. U tu svrhu koriste se adaptivni sustavi s asocijativnom memorijom.
Robusni upravljački sustavi koriste se i za upravljanje industrijskim manipulatorima koji su trenutno u širokoj praktičnoj upotrebi.
Implementacija inteligentnog upravljanja
Problem funkcioniranja robotskog sustava u uvjetima neizvjesnosti višestruk je.
Razmotrimo problem planiranja ponašanja robotskog sustava u uvjetima nesigurnosti. Za rješavanje ovog problema najprikladnije je koristiti tehnologiju dinamičkih ekspertnih sustava. Baza znanja takvog ekspertnog sustava s vremenom se prilagođava. Ako se koristi baza pravila proizvodnje, tada se sastav pravila proizvodnje kontinuirano ispituje na cjelovitost i dosljednost. Osim toga, zbog algoritama prilagodbe ažuriraju se i zamjenjuju zastarjela i zastarjela pravila. Istodobno, posebna se pozornost posvećuje pitanjima obuke ekspertnog sustava bez nastavnika (samoobuka) zbog činjenice da praćenje sustava od strane visokokvalificiranog stručnjaka nije ekonomski izvedivo.
Blok za samoučenje ili samopodešavanje baze znanja ekspertnog sustava zahtijeva pažljivo proučavanje u fazi projektiranja inteligentnog upravljačkog sustava robotskog sustava.
moj. Učinkovitost rješavanja problema često ovisi o kvaliteti izvršenja ove faze projektiranja. Treba uključiti podsustave za ocjenu potpunosti i nedosljednosti znanja, ocjenu kvalitete upravljanja i korekciju znanja.
Kronološki, sljedeća faza nakon planiranja ponašanja može biti problem izdavanja upravljačkih naredbi robotskom sustavu na prirodnom jeziku. Za stvaranje sučelja na prirodnom jeziku, po našem mišljenju, najprikladniji alat za implementaciju je teorija neizrazitih skupova.
Uz pomoć lingvističkih varijabli koje sadrže određeni, unaprijed opisani skup pojmova, izrađuje se opis predmetnog područja, ograničenog sustava naredbi i objekata koji utječu na robotski sustav i mijenjaju se pod njegovim utjecajem. Metode fazifikacije i defazifikacije korištene u ovom slučaju, kao i algoritmi neizrazitog logičkog zaključivanja, imaju značajan utjecaj na točnost upravljačkih akcija i brzinu rada robotskog sustava.
I na kraju, korištenje sustava upravljanja neuronske mreže za robotske sustave. Glavna prednost neuronske mreže je u tome što nema potrebe za poznavanjem ili stvaranjem matematičkog modela objekta, budući da je neuronska mreža univerzalni neizraziti aproksimator.
Objekt (robotski sustav) djeluje kao “crna kutija”. Neuronska mreža može djelovati kao referentni model za kontrolirani robotski sustav. Treba napomenuti da to mora biti učeća višeslojna neuronska mreža (identifikator objekta). Model neuronske mreže prilagođava se objektu upravljanja na temelju neusklađenosti izlaznih signala objekta i modela. Također formira uzorak za obuku za podešavanje i podešavanje upravljačkog uređaja u skladu s odabranim kriterijem kvalitete.
Zaključak
Analiza je omogućila sintezu arhitekture inteligentnog upravljačkog sustava za robotske sustave, nepromjenjivog s obzirom na specifičnosti rada. Razvijeni algoritam situacijske identifikacije omogućuje konstrukciju visoko informativnih senzorskih mapa vanjskog okruženja. Opisani su glavni pristupi formiranju inteligentnih sustava upravljanja robotskim sustavima. Prikazani su smjerovi budućeg razvoja najučinkovitijih metoda umjetne inteligencije koje se koriste za implementaciju upravljačkih uređaja.
BIBLIOGRAFIJA
1. Yurevich E. I. Osnove robotike. - St. Petersburg: BHV-Petersburg, 2007. - 416 str.
2. Manipulacijski sustavi robota / ur. A. I. Korendyaseva. - M.: Strojarstvo, 1989. - 472 str.
3. Burdakov S. F. Sinteza robusnih regulatora s elastičnim elementima: zbornik članaka. znanstveni tr. - br. 443. Mehanika i procesi upravljanja. - St. Petersburg: Državno tehničko sveučilište St. Petersburg, 1992.
4. Protalinsky O. M. Primjena metoda umjetne inteligencije u automatizaciji tehnoloških procesa: monografija. - Astrakhan: Izdavačka kuća ASTU, 2004. - 184 str.
Članak je u uredništvo zaprimljen 13.01.2010
INTELEKTUALNO UPRAVLJANJE ROBOTSKIM SUSTAVIMA U UVJETIMA NEIZVJESNOSTI
I. A. Ščerbatov
Svrha ovog rada je formiranje pristupa izgradnji intelektualnih sustava upravljanja robotskim sustavima, nepromjenjivih u odnosu na specifičnosti funkcioniranja, s obzirom na nepotpunost ulaznih informacija i razne vrste nesigurnosti. Provedena je analiza koja je omogućila sintezu arhitekture intelektualnog upravljačkog sustava robotskih sustava nepromjenjivih u odnosu na specifičnosti funkcioniranja. Razvijeni algoritam situacijske identifikacije omogućuje izgradnju dobrih dodirnih kartica okoline. Opisani su osnovni pristupi oblikovanju sustava intelektualnog upravljanja robotskim sustavima. Prikazani su pravci perspektivnog razvoja najučinkovitijih metoda umjetne inteligencije primijenjenih na implementaciju pokretačkih uređaja.
Ključne riječi: robotski sustav, robot, intelektualno upravljanje, strukturna nesigurnost, nepotpunost informacija, kartica osjetljiva na dodir, neuronska mreža, teorija nejasnih skupova, samoučeni ekspertni sustav.
Koncepti: inteligentni sustav (IntS), inteligentni sustav upravljanja (IntSU)
Koncept “inteligentnog sustava” različiti istraživači različito tumače. Razmotrimo glavne, uključujući popratna objašnjenja.
Inteligentni sustav je informacijsko-računalni sustav s inteligentnom podrškom za rješavanje problema bez sudjelovanja operatera (decision maker - donositelj odluka). Inteligentni sustav je informacijsko-računalni sustav s inteligentnom podrškom za rješavanje problema uz sudjelovanje operatera – donositelja odluka. Osnovne inteligentne tehnologije, uključujući umjetne neuronske mreže (ANN), genetske algoritme, neizrazitu logiku, mogu se učinkovito koristiti u stvaranju sustava upravljanja. Istodobno, izvedivost njihove upotrebe određena je sposobnošću implementacije distribuiranih proračunskih shema, što omogućuje proširenje prostora pretraživanja bez značajnog povećanja složenosti potrebnih izračuna; sposobnost opisivanja procesa upravljanja "jednostavnim" jezikom, bliskim prirodnom; mogućnost neanalitičkog prikaza nelinearnih objekata upravljanja i opis procesa koji karakterizira višeznačnost i veliki broj posebnih situacija; sposobnost brzog traženja u prostoru rješenja za loše formalizirane probleme.
Inteligentni sustavi To su sustavi temeljeni na znanju. Kada se obrađuje na računalu, znanje se transformira slično kao i podaci: 1) Znanje u ljudskom pamćenju kao rezultat razmišljanja. 2) Materijalni nosioci znanja (udžbenici, nastavna sredstva). 3) Područje znanja - uvjetni opis glavnih objekata predmetnog područja, njihovih atributa i obrazaca koji ih povezuju. 4) Prikaz znanja temeljen na bilo kojem modelu (produkcijskom, semantičkom, okvirnom ili drugom). Proizvodni model ili model temeljen na pravilima omogućuje da se znanje predstavi u obliku rečenica poput "Ako , Da" Semantička mreža je usmjereni graf čiji su vrhovi pojmovi, a lukovi odnosi između njih. Okvir je struktura podataka za predstavljanje nekog konceptualnog objekta. 5) Baza znanja o računalnim medijima za pohranu podataka. Kada se koristi proizvodni model, baza znanja sastoji se od skupa pravila. Program koji upravlja nabrajanjem pravila naziva se inferencijalna mašina (reasoning engine, inference engine, deductive engine, interpreter, rule interpreter, solver). Izlazni stroj radi ciklički. U svakom ciklusu promatra postojeće činjenice iz radne memorije (baze podataka) i pravila iz baze znanja, a zatim ih uspoređuje. Skup odabranih pravila čini tzv. konfliktni skup (to jest, u određenoj situaciji može se primijeniti više pravila odjednom). Za rješavanje sukoba mehanizam za zaključivanje ima kriterij prema kojem odabire jedno pravilo, nakon čega se ono pokreće. To se izražava u unosu činjenica (preporučenih radnji) koje tvore zaključak pravila u radnu memoriju ili u promjeni kriterija za odabir proturječnih pravila. Ako zaključak pravila uključuje naziv radnje, ona se pokreće. Mehanizam zaključivanja temelji se na principu modus ponens, koji se tumači na sljedeći način: "Ako se zna da je izjava A istinita i postoji pravilo oblika "ako A, onda B", tada je izjava B istinita."
Pod, ispod inteligentni sustavi razumjeti bilo koji biološki, umjetni ili formalni sustav koji pokazuje sposobnost uključivanja u ponašanje usmjereno ka cilju. Ovo posljednje uključuje svojstva (manifestacije) komunikacije, akumulacije znanja, donošenja odluka, učenja, prilagodbe. Istraživanje umjetne inteligencije temelji se na pristupu znanja. Oslanjanje na znanje osnovna je paradigma umjetne inteligencije. U radu su interpretacije znanja objedinjene u četiri skupine (ili razine): psihološku, intelektualnu, formalno-logičku i informacijsko-tehnološku. Psihološka interpretacija znanja - mentalne slike, mentalni modeli. Intelektualna interpretacija znanja je skup informacija o određenom predmetnom području, uključujući činjenice o objektima danog predmetnog područja, svojstva tih objekata i odnose koji ih povezuju, opise procesa koji se odvijaju u danom predmetnom području, kao i informacije o načinima rješavanja tipičnih problema. Formalno-logička interpretacija je formalizirana informacija o određenom predmetnom području, koja se koristi za dobivanje (zaključivanje) novih znanja o tom predmetnom području pomoću specijaliziranih postupaka. Interpretacija informacijske tehnologije - strukturne informacije pohranjene u memoriji računala i korištene u radu inteligentnih programa.
U radovima D.A. Pospelov i njegovi kolege opisali su sljedeće konceptualna svojstva znanja: unutarnja interpretabilnost, shvaćeno kao prisutnost jedinstvenih imena koja identificiraju svaku informacijsku jedinicu; struktura, koji određuje mogućnost rekurzivnog ugniježđivanja pojedinih informacijskih jedinica jedne u drugu; vanjsko povezivanje, definiranje mogućnosti uspostavljanja funkcionalnih, povremenih i drugih vrsta odnosa između informacijskih jedinica; skalabilnost, karakteriziranje mogućnosti uvođenja različitih metrika za bilježenje kvantitativnih, ordinalnih i drugih odnosa informacijskih jedinica; aktivnost, odražavajući sposobnost pokretanja određenih odgovarajućih radnji kada se pojave nove informacije.
Inteligentni informacijski sustav(ili sustav temeljen na znanju) temelji se na konceptu korištenja baze znanja za generiranje opcija za rješavanje primijenjenih problema različitih klasa, ovisno o specifičnim informacijskim potrebama korisnika. Glavna svrha izgradnje takvih sustava je identificirati, proučavati i primijeniti znanje visokokvalificiranih stručnjaka za rješavanje složenih problema koji se pojavljuju u praksi. Pri izgradnji sustava temeljenih na znanju koristi se znanje koje su akumulirali stručnjaci u obliku specifičnih pravila za rješavanje određenih problema. Ovaj smjer ima za cilj oponašanje ljudske umjetnosti analiziranja nestrukturiranih i polustrukturiranih problema.
U primijenjenoj teoriji inteligentnih sustava (IntS), upravljački sustav se razmatra samo u bliskoj interakciji s vanjskim svijetom koji ga okružuje, a inteligentni sustav se tumači kao skup aktivnih subjekata i objekata (subjekata) koji im se suprotstavljaju, generirani bilo situacijskom mogućnošću aktivnog postojanja subjekta, ili ciljnom zadaćom nekog sistemskog ili izvansistemskog subjekta, a svi elementi bilo koje prirode koji čine intelektualni sustav pod utjecajem su im zajedničkog vanjskog svijeta. .
U radu A.V. Timofeev i R.M. Yusupov je rekao da IntSU uključuje elemente umjetne inteligencije koji omogućuju formiranje koncepata i akumulaciju znanja, planiranje ponašanja i donošenje odluka u neizvjesnim uvjetima, prepoznavanje slika i formiranje modela okoline. Uvođenje obavještajnih elemenata u sustave automatskog upravljanja (ACS) značajno proširuje njihovu funkcionalnost u usporedbi s adaptivnim samohodnim topovima. Kao rezultat intelektualizacije, samohodno oružje stječe sposobnost rješavanja određenih vrsta intelektualnih zadataka koji su se obično postavljali ljudima. Stoga se IntSU sve više koriste u slučajevima kada situacija ne dopušta (ne opravdava) izravno sudjelovanje ljudskog operatera u procesu upravljanja ili kada je potrebno smanjiti intenzitet rada operatera kada objekt upravljanja radi u normalnim načinima rada .
Potreba za intelektualizacijom sustava automatskog upravljanja obično se javlja u slučajevima kada su objekti upravljanja složeni (primjerice, objekti s nelinearnom dinamikom koji rade u uvjetima nesigurnosti), a njihov opis i interakciju s okolinom teško je strukturirati i formalizirati. Nepotpunost opisa očituje se kako u apriornoj neodređenosti modela objekta i okoline, tako i u neodređenosti i različitosti ciljeva upravljanja. Često je opis ponašanja takvih objekata nejasan i sadrži kvalitativne informacije (procjene stručnjaka, prihvatljivi zaključci, funkcije pripadnosti). Rješavanje problema upravljanja u takvim uvjetima nemoguće je bez primjene metoda umjetne inteligencije, odnosno bez intelektualizacije sustava upravljanja vlastitim pogonom.
Dakle, intelektualizacija sustava automatskog upravljanja svodi se na reprezentaciju i obradu znanja o okolini, objektu i sustavu upravljanja pomoću potrebnih sredstava učenja i prilagodbe. Ovo znanje i alati omogućuju doradu modela upravljačkog objekta i okoline i daju ACS-u fundamentalno nova svojstva, slična intelektualnim sposobnostima ljudskog operatera ili stručnjaka. Karakteristične značajke IntSU-a su njihova sposobnost učenja i samoučenja kroz formiranje znanja, sintetiziranja i identificiranja obrazaca ponašanja, prepoznavanja i analiziranja situacija, samoorganizacije i prilagodbe u odnosu na različite čimbenike. Ove sposobnosti omogućuju kompenzaciju različitih čimbenika unutarnje i vanjske nesigurnosti koji nastaju tijekom rada ACS-a i time poboljšavaju ili optimiziraju kvalitetu upravljanja.
Dalje, IntSU nazvat ćemo takav sustav u kojem se znanje o nepoznatim karakteristikama upravljačkog objekta i okoline formira u procesu učenja i prilagodbe, a dobivene informacije koriste u procesu automatskog donošenja upravljačkih odluka tako da poboljšava se kvaliteta kontrole. Imajte na umu da se procesi učenja i prilagodbe mogu odvijati ili izolirano od procesa kontrole (na primjer, u načinu obuke s učiteljem, obično glumi ljudski operater ili stručnjak), ili izravno u procesu automatske kontrole u stvarnom vremenu .
Razmotrimo značajke funkcionalne strukture tipičnih predstavnika klase inteligentnih upravljačkih sustava, tumačeći ih u odnosu na tehnološke upravljačke objekte (jedinice, strojeve, strojne komplekse).
Program br. 14 temeljnih istraživanja OEMMP RAS
“ANALIZA I OPTIMIZACIJA RADA VIŠERAZINSKIH, INTELIGENTNIH I MREŽNIH SUSTAVA UPRAVLJANJA U UVJETIMA NESIGURNOSTI”
1. Obrazloženje Programa
1.1. Znanstveni i praktični značaj
Intenzivan razvoj tehnologije (umrežavanje, minijaturizacija računala, povećanje njihove brzine i sl.) postavlja nove zahtjeve pred suvremene upravljačke sustave i otvara nove mogućnosti kako na razini ugrađenih upravljačkih sustava (na razini velikih dispečerskih centara), tako i na mrežna razina (komunikacije).mrežna, grupna) interakcija decentraliziranih višeagentskih sustava. Sustavi upravljanja sve više poprimaju karakter sustava upravljanja informacijama i proučavaju se na sjecištu teorija upravljanja, računarstva i komunikacije. Dakle, uzimanje u obzir svojstava komunikacijskih kanala je potrebno, na primjer, u decentraliziranim (višeagentskim) sustavima, a karakteristike ugrađenog računala važne su kada se u sustavima upravljanja na više razina implementiraju takve inteligentne funkcije kao što je tehnički vid , akcijsko planiranje, obuka, višekriterijalno odlučivanje, promišljanje i sl. Konkretno, intelektualizacija upravljanja je namijenjena povećanju stupnja autonomije funkcioniranja sustava, kada nedostatak kvantitativnih modela dinamike ili poremećaja u funkcioniranju objekta upravljanja, uzrokujući gubitak primjerenosti kvantitativnih modela (na primjer, jednadžbi koje opisuju evoluciju složenog sustava), jačaju ulogu kvalitativnih (tzv. „znanje“, na primjer, logičko-lingvistički) modela objekta i okoline koja se koristi na gornjim razinama sustava upravljanja.
Program je usmjeren na rješavanje temeljnih problema koji se javljaju u prioritetnim područjima znanosti, tehnologije i inženjerstva Ruske Federacije. Postavlja se zadatak dobiti nove fundamentalne i primijenjene rezultate u području teorije upravljanja složenim tehničkim, čovjek-strojnim i drugim sustavima, uzimajući u obzir nesigurnost i nedostatak početnih informacija, uključujući: teoriju analize i sinteze stohastičkih sustava. , teorija stvaranja sustava upravljanja gibanjem i tehnološkim procesima, s trenutnom dijagnostikom i praćenjem tehničkog stanja, kao i teorija stvaranja sustava automatiziranog projektiranja i inteligentnog upravljanja temeljenih na suvremenim informacijskim tehnologijama.
Zbog raznolikosti primjene teorije upravljanja, analize i optimizacije u različitim primjenama (transport, logistika, proizvodnja, zrakoplovni i svemirski sustavi, podmornice i površinski brodovi itd.), potrebno je uzeti u obzir velik broj faktora složenosti. , kao što su:
· višerazinsko upravljanje,
· decentralizacija,
· nelinearnost,
· višestrukost,
· raspodjela parametara,
· različiti razmjeri procesa u prostoru i vremenu,
· visoke dimenzije,
· heterogenost opisa podsustava,
· više načina,
· prisutnost impulsnih utjecaja,
· prisutnost koordinatno-parametarskih, strukturnih, pravilnih i singularnih poremećaja,
· korištenje determinističkih i probabilističkih modela za opisivanje nesigurnosti informacija o vektoru stanja i parametrima sustava, o svojstvima grešaka mjerenja i vanjskom okruženju,
prisutnost učinaka kašnjenja u kontroli ili objektu,
· opća strukturna složenost suvremenih sustava upravljanja.
Za postizanje postavljenog cilja i rješavanje glavnih zadataka Program uključuje istraživanje i razvoj u sljedećim glavnim područjima:
1. Analiza i optimizacija funkcioniranja u različitim vremenskim skalama višerazinskih sustava upravljanja s nepotpunim informacijama.
2. Upravljanje i optimizacija u višerazinskim i decentraliziranim sustavima organizacijske i tehničke prirode.
2.1. Upravljanje i optimizacija u mrežnocentričnim sustavima.
2.2. Inteligentna kontrola pokretnih objekata.
2.3. Modeliranje i optimizacija višerazinskih informacijsko-upravljačkih sustava u stvarnom vremenu.
Smjer 1. Analiza i optimizacija funkcioniranja u različite vremenske skale višerazinskih sustava upravljanja s nepotpunim informacijama
Složenost mnogih modernih sustava upravljanja često ne dopušta dobivanje unaprijed potpunog opisa procesa koji se odvijaju unutar sustava i njegove interakcije s okolinom. U pravilu se realni sustavi opisuju nelinearnim jednadžbama dinamike, a nerijetko matematički modeli sustava upravljanja uzimaju u obzir samo dopuštene raspone promjena parametara i karakteristika pojedinih elemenata bez specificiranja samih parametara i karakteristika.
Osim toga, u nekim sustavima, posebno mikromehaničkim i kvantnim, uporaba klasičnih metoda opisa u kontinuiranom ili diskretnom vremenu komplicirana je činjenicom da su unutarnje i/ili vanjske sile međudjelovanja, kao i upravljačke radnje, prolazne, impulzivne prirode i ne može se točno izračunati . Čini se da sustav radi na različitim vremenskim skalama: stvarnim (sporo) i brzim (puls). Takva vremenska raznolikost interno je svojstvo mnogih modernih sustava upravljanja, uključujući sustave s upravljanjem na više razina, u kojima gornje razine koriste kvalitativne i diskretne modele, a niže razine često koriste kvantitativne modele s kontinuiranim vremenom.
Iz tog razloga, razvoj metoda za matematičku formalizaciju opisa funkcioniranja takvih sustava u hibridnom (kontinuirano-diskretnom) vremenu, proučavanje njihovih svojstava upravljivosti i stabilnosti u uvjetima nepotpunih informacija, protudjelovanja i nestandardnih ograničenja. o kontrolama i faznim varijablama je hitan zadatak. Jednako hitan zadatak je razvoj metoda za sintezu optimalnog upravljanja takvim kontinuirano-diskretnim sustavima, kako determinističkim tako i stohastičkim.
Osim toga, u uvjetima nesigurnosti i nedostatka apriornih informacija, vrlo su relevantni zadaci optimizacije procesa prikupljanja i obrade informacija (upravljanje promatranjem i optimalno filtriranje).
Smjer 2. Upravljanje i optimizacija u višerazinskim i decentraliziranim sustavima organizacijske i tehničke prirode
2.1. Upravljanje i optimizacija u mrežnocentričnim sustavima
Suvremene složene organizacijske i tehničke sustave karakteriziraju visoke dimenzije, decentralizacija, višerazinsko upravljanje, potreba za učinkovitim planiranjem aktivnosti uzimajući u obzir obuku, višekriterijskim odlukama i refleksijom upravljanih subjekata.
Problemi planiranja i upravljanja diskretnim i kontinuiranim distribuiranim višestruko povezanim sustavima velikih dimenzija također su karakterizirani višerazmjernim procesima ne samo u vremenu, već i raspodjelom i višerazmjernom prirodom prostora i predstavljaju jedan od najsloženijih. i radno intenzivne klase optimizacijskih problema. Zbog toga je preporučljivo razvijati istraživačke metode i pristupe pronalaženju točnih i približnih rješenja, kao i simulacijske alate za korištenje u sustavima za podršku odlučivanju za planiranje, projektiranje i upravljanje složenim tehničkim, organizacijskim (uključujući promet i logistiku) i informacijskim sustavima. .
Za upravljanje grupnom interakcijom komponenti decentraliziranih organizacijskih i tehničkih sustava (mrežnocentrični sustavi, proizvodni sustavi, računalne, telekomunikacijske i druge mreže itd.) u uvjetima ograničenja komunikacijskih kanala i složenosti izračuna, karakteristika procesa obrade informacija , kao i ograničenja vremena donošenja odluka, računalnih mogućnosti i kapaciteta komunikacijskog kanala. Stoga je relevantno razviti metode za optimizaciju (uzimajući u obzir navedena ograničenja) strukture složenih organizacijskih i tehničkih sustava, uključujući istovremeno razmatranje mnogih kriterija: detaljnost početnih podataka, učinkovitost prikupljanja informacija, planiranje i refleksivno odlučivanje- izrade, ograničena produktivnost pojedinih računala, smanjenje dupliciranja posla, kao i udio pomoćnih izračuna povezanih s servisiranjem prijenosa podataka.
Višerazinske i decentralizirane sustave karakterizira distribuirano donošenje odluka u stvarnom vremenu u uvjetima informacijskog protudjelovanja, kao i nepotpune i heterogene informacije, često višekriterijalne kvalitativne i subjektivne prirode. Zbog toga je potrebno razviti metode za stvaranje adekvatnih sustava informacijske potpore i podrške donošenju strateških i operativnih odluka u uvjetima nepotpunih informacija i protudjelovanja. U tu svrhu posebno je preporučljivo razviti: višeagentne modele dinamičkih organizacijskih i tehničkih sustava, uključujući mrežne modele s sukobljenim subjektima, modele grupnog ponašanja i njegovu prognozu, procjenu ravnoteže interesa i formiranje koalicije u tim sustavima, kao i razvoj informacijskih tehnologija i načina prezentiranja informacija o vanjskom okruženju i znanja inteligentnih agenata.
2.2. Inteligentna kontrola pokretnih objekata
Kvantitativni modeli ne mogu uvijek biti kreirani za rješavanje zadanih problema, stoga se uz tradicionalne metode Program koristi i metodama umjetne inteligencije. Umjetna inteligencija, kao polje znanja, doživjela je veliki skok u proteklih pedesetak godina, kako u razvoju i pojašnjenju samog pojma inteligencije, tako i u području praktične primjene umjetne inteligencije u različitim područjima ljudskog djelovanja: u tehnologiji, ekonomiji, poslovanju, medicini, obrazovanju itd. Mnogi teorijski koncepti i metode umjetne inteligencije transformirani su u primijenjene inteligentne tehnologije temeljene na znanju.
Posebnost moderne generacije inteligentnih sustava je u tome što se temelje na složenom modelu vanjske okoline, koji uzima u obzir kako kvantitativne informacije tako i kvalitativne modele – znanja o mogućem ponašanju različitih objekata okoliša i njihovim međusobnim odnosima. Korištenje takvih modela postalo je moguće zahvaljujući razvoju metoda za reprezentaciju znanja, metoda za integraciju podataka iz različitih izvora te značajnom povećanju brzine i memorijskog kapaciteta računala.
Prisutnost modela vanjske okoline omogućuje suvremenim inteligentnim sustavima za upravljanje pokretnim objektima donošenje odluka u uvjetima višekriterija, neizvjesnosti i rizika, a kvaliteta tih odluka može premašiti kvalitetu odluka koje osoba donosi u uvjetima preopterećenost informacijama, ograničeno vrijeme i stres.
U tom smislu, hitan zadatak je razviti nova sredstva i metode za razvoj inteligentnog upravljanja pokretnim objektima u prisutnosti gore navedenih čimbenika.
2.3. Modeliranje i optimizacija višerazinskih informacijsko-upravljačkih sustava u stvarnom vremenu
Relevantnost istraživanja u ovom smjeru je zbog potrebe za razvojem metoda za analizu i sintezu višerazinskih otvorenih modularnih informacijskih i upravljačkih sustava u stvarnom vremenu (ICS RV) višemodnih i višenamjenskih objekata koji rade u uvjetima nesigurnosti, strukturnih poremećaja i izvanrednih situacija (ESS). Među tim nadzornim objektima su kritični objekti i sustavi odgovorne uporabe koji određuju sigurnost države.
Očito je da se problemi i zadaci stvaranja sustava ove klase mogu uspješno riješiti na temelju razvoja jedinstvene teorije i primijenjenih programski orijentiranih metoda dinamičke i scenarijske analize i sinteze strukture takvih sustava, njihove algoritamske analize. , softverska i informacijska podrška te mehanizmi za razvoj učinkovitih upravljačkih akcija. To prije svega uključuje razvoj formalizirane metodologije za dizajn otvorenih sustava upravljanja informacijama, uključujući modele i metode za sintezu optimalne modularne strukture objektno orijentiranih I&C RT s otvorenom arhitekturom prema različitim kriterijima učinkovitosti. Na temelju rezultata dobivenih u fazi dinamičke analize sintetizirana je optimalna funkcionalna modularna struktura obrade i upravljanja podacima, odnosno određen optimalan sastav i broj modula RT IMS-a, sintetizirano sučelje sustava i struktura utvrđuje se njegova programska i informacijska podrška za obradu ulaznih tokova zahtjeva.
Za planiranje akcija i podršku donošenju odluka u uvjetima nesigurnosti, strukturnih poremećaja i izvanrednih situacija, preporučljivo je koristiti metode analize scenarija i sinteze učinkovitih upravljačkih akcija u ICS RV. U ovom slučaju, matematički model širenja strukturnih poremećaja i izvanrednih situacija bit će oblikovan u jeziku težinskih ili funkcionalnih znakovnih grafova. Na temelju ovog modela sintetizirat će se racionalni scenariji upravljanja objektima korištenjem koncepata potencijala izvedbe, trajnosti i opstojnosti njihovih sastavnih elemenata. Provest će se sinteza scenarija za otklanjanje uzroka i posljedica izvanrednih situacija u višemodnim ciljanim objektima uzimajući u obzir dinamički određena vremenska i resursna ograničenja. Također je potrebno razviti formulacije i metode za rješavanje inverznih problema kontrole preživljavanja višemodalnih i višenamjenskih objekata koji rade u uvjetima nesigurnosti, strukturnih poremećaja i izvanrednih situacija.
Gore navedene specifičnosti upravljačkih sustava i objekata, znanstveni i praktični značaj rješavanja problema upravljanja, analize i optimizacije za njih omogućuju nam da formuliramo sljedeće glavne ciljeve i zadatke Programa.
1.2. Glavni ciljevi i zadaci
Glavni cilj Programa je rješavanje temeljnih problema teorije upravljanja koji otežavaju realizaciju perspektivnih projekata od važnog nacionalnog značaja u području upravljanja složenim dinamičkim i inteligentnim sustavima s primjenom na upravljanje kretanjem tehničkih objekata i procesa u tehnološkim i organizacijskim sustava.
Istraživanje će se provoditi o sljedećim općim temama.
Smjer 1
· Razvoj metoda za stabilizaciju nelinearnih sustava u situacijama nepotpunog mjerenja koordinata i ograničenja dopuštene strukture upravljačkih sila.
· Razvoj metoda za robusno i adaptivno promatranje i upravljanje prema determinističkim, probabilističkim i drugim modelima nesigurnosti parametara objekta upravljanja i radne okoline.
· Razvoj metoda i algoritama za kvalitativnu i kvantitativnu analizu kontinuiranih, diskretnih i višerazinskih kontinuirano-diskretnih dinamičkih modela i sintezu upravljanja temeljenu na metodi redukcije s vektorskim i matričnim usporednim funkcijama i transformacijama modela.
· Proučavanje problema optimalnog upravljanja novom klasom mehaničkih sustava koji se kreću u otpornim medijima promjenom konfiguracije ili kretanja unutarnjih tijela.
· Razvoj metoda za matematičku formalizaciju i rješavanje problema udarne interakcije mehaničkih sustava u prisutnosti suhog trenja.
· Razvoj metoda optimalnog upravljanja diskretno-kontinuiranim i impulsno dinamičkim sustavima.
· Razvoj metoda za garantirano upravljanje nelinearnim objektima izloženim nekontroliranim poremećajima u obliku dinamičkih igara.
· Razvoj teorije upravljanja kvantnim sustavima.
· Razvoj metoda i algoritama za analizu dinamičkih svojstava kao što su stabilnost, invarijantnost, disipativnost za ocjenu stanja i sintezu višerazinskog upravljanja sustavima s heterogenim opisom dinamike procesa na različitim razinama.
Smjer 2.1
· Metode rješavanja problema upravljanja za velike mrežnocentrične sustave s distribuiranim parametrima i procesima u više razmjera (u prostoru i vremenu).
· Modeli i metode komunikacijsko-mrežnog decentraliziranog inteligentnog upravljanja distribuiranim projektima i programima.
· Metode optimizacije strukture višerazinskih i decentraliziranih sustava.
· Metode i strukture računalne implementacije mrežnocentričnog upravljanja u matematički homogenom prostoru distribuiranog i paralelnog računalstva.
· Modeli i metode grupnog odlučivanja temeljeni na nepotpunim, heterogenim, kvalitativnim i subjektivnim informacijama.
· Modeli i metode za planiranje i upravljanje kompleksima međusobno povezanih operacija u složenim tehničkim i transportno-logističkim sustavima.
· Razvoj principa, arhitekture, metoda i algoritama za kreiranje distribuiranih softverskih inteligentnih sustava temeljenih na višeagentskim tehnologijama.
· Razvoj modela i metoda upravljanja informacijama u višeagentskim mrežnim strukturama.
Smjer2.2
· Razvoj generaliziranih modela situacijskog upravljanja, koji odražavaju značajke uključivanja neizrazitih, neuronskih mreža i logičko-dinamičkih elemenata u strukturu modela.
· Razvoj metode planiranja trase koja osigurava svojstvo komunikacijske stabilnosti skupine kontroliranih dinamičkih objekata, heterogenih (kvantitativno i kvalitativno) u svojoj modelskoj reprezentaciji.
· Razvoj metoda za analizu i sintezu prilagodljivih platformi za modeliranje u stvarnom vremenu koje uzimaju u obzir nelinearnost, višestruku povezanost i visoku dimenzionalnost upravljačkih objekata s primjenom na pomorske pokretne objekte.
· Optimizacija inteligentnih sustava za višerazinsko upravljanje pokretnim objektima u konfliktnom okruženju, uzimajući u obzir njihovu grupnu interakciju, višekriterije, neizvjesnost i rizik.
· Razvoj metoda za osiguranje tehničkog vida za inteligentne sustave upravljanja.
· Razvoj metoda za inteligentno upravljanje dinamičkim objektima koji izvode složeno manevriranje, na temelju organizacije prisilnog kretanja u prostoru stanja sustava.
Smjer2.3
· Modeli i metode za analizu i optimizaciju modularne strukture objektno orijentiranih višerazinskih informacijskih i upravljačkih sustava u stvarnom vremenu s otvorenom arhitekturom u uvjetima nesigurnosti i strukturnih poremećaja.
· Metode analize i optimizacije režima elektroenergetskih sustava i njihovo upravljanje.
· Modeli i metode scenarijsko-indikatorskog pristupa traženju točaka ranjivosti za zadatke upravljanja.
· Metode modeliranja, analize i optimizacije višemodnih procesa za upravljanje pokretnim objektima.
· Razvoj metoda i algoritama za inteligentnu identifikaciju nelinearnih nestacionarnih objekata za poboljšanje učinkovitosti upravljanja formiranjem tehnološke baze znanja temeljene na apriornim informacijama o objektu upravljanja.
· Geoinformacijske tehnologije za modeliranje prirodno-tehnogenih kompleksa u problemima upravljanja ekosustavima megagradova.
· Analiza i optimizacija informacijske podrške za navigacijske i upravljačke sustave.
· Modeli i metode upravljanja proizvodnim procesom.
Rezultati razvijene teorije i metoda analize i sinteze sustava upravljanja koristit će se u sljedećim područjima:
· nadzor prometa u zrakoplovstvu i astronautici, kopneni i pomorski objekti, vozila;
· višeagentni mrežno-centrični sustavi, proizvodni sustavi, računalne, telekomunikacijske i druge mreže ;
· transportni i logistički sustavi ;
· globalna energija, transport plina i drugi veliki infrastrukturni sustavi;
· sustavi informacijske potpore zadacima upravljanja i potpore donošenju strateških i operativnih odluka u uvjetima nepotpunih informacija i protudjelovanja.
Temeljni problemi teorije izgradnje sustava upravljanja zahtijevaju njihov intenzivan razvoj. Razvoj istraživanja u ovom smjeru omogućit će:
Razvoj teorijskih temelja za rješavanje složenog trostrukog problema upravljanja-računanja-komunikacije (problem - " Kontrolirati- Računanje- Komunikacija") za složene informacijske i upravljačke sustave, uključujući u uvjetima ograničenja komunikacijskih kanala i kvarova podsustava;
Rješavati probleme upravljanja temeljno novim objektima i procesima koji se odnose na pokretne objekte, objekte posebne namjene, tehnološke i organizacijske sustave;
Stvoriti učinkovite metode za funkcionalnu dijagnostiku i osiguranje otpornosti na pogreške sustava upravljanja zrakoplovom i drugim pokretnim objektima, kao i dinamičke stabilnosti elektroenergetskih sustava;
Poboljšati kvalitetu, ubrzati i pojeftiniti razvoj projektnih rješenja kroz algoritmizaciju i automatizaciju procesa razvoja sustava upravljanja.
U daljnjem tekstu upravljanje se razumijeva u širem smislu, uključujući komunikacijsku mrežu, grupno, distribuirano upravljanje (u engleskoj literaturi - upravljanje u mrežama, upravljanje nad mrežama, distribuirano upravljanje itd.)