Control object of intelligent control systems. Concepts: intelligent system (IntS), intelligent control system (IntSU). The need for intelligent control
This article is also available:
Rosenberg Igor Naumovich
Intelligent control// Modern control technologies. ISSN 2226-9339
. — . Article number: 7608. Publication date: 2017-04-10. Access mode: https://site/article/7608/Introduction
Intelligent management is a generalization of semiotic, cognitive and information management. In intelligent transport management, the following areas are distinguished: intelligent transport systems, intelligent semiotic control and intelligent cognitive control. Intelligent semiotic control is associated with different forms of logic, a system of products, and evolutionary algorithms. Intelligent cognitive control is considered as a synthesis of human computer control using associative channels and analysis of tacit knowledge. Intelligent control is considered as a means of making decisions under conditions of uncertainty. Intelligent information management is considered as supporting intelligent management through information technology.
The need for intelligent control
As society developed and objects and management tasks became more complex, management technologies also changed. The problem of “big data” has become most acute in managing complex situations. It creates an information barrier for “organizational management” technologies. Modern management is characterized by the growth of poorly structured information. This causes a transition to intelligent management, which, in turn, leads to the need to use knowledge management technologies. The basis of intelligent management is intelligent systems and intelligent technologies. An intelligent system is a technical or software-hardware system capable of obtaining creative solutions to problems belonging to a specific subject area, knowledge about which is stored in the memory of such a system. In a simplified way, the structure of an intelligent system includes three main blocks - a knowledge base, a solver and an intelligent interface. The solver is the dominant component of the intelligent system. In first-order logic, a solver is a mechanism for obtaining solutions to logical expressions. In multi-agent systems, which are classified as artificial intelligence, the concept of a solver is also used. An agent is a problem solver, which is a software entity capable of acting in the interests of achieving set goals. In symbolic modeling, the s-solver is the message specialization value. Efimov E.I. was one of the first in Russia to introduce this concept. . This short list shows the importance of the solver for intelligent systems and intelligent technologies.
Intelligent control within the framework of applied semiotics
Semiotics studies the nature, types and functions of signs, sign systems and human sign activity, the sign essence of natural and artificial languages with the aim of constructing a general theory of signs. In the field of semiotics, there is the direction of “applied semiotics”, the founder of which is D.A. Pospelov.
In semiotics, there are two areas of application of signs: cognition and communication. This divides semiotics into two parts: semiotics of knowledge; semiotics of semantic communications. The basis of intelligent control is the semiotic system. According to Pospelov, the semiotic system W is an ordered eight of sets:
W=< T, R, A, P, τ, ρ, α, π>, (1)
Where
T - set of basic symbols;
R - set of syntactic rules;
A - a lot of knowledge about the subject area;
P is the set of rules for deriving solutions (pragmatic rules);
τ—rules for changing the set T;
ρ—rules for changing the set R;
α are the rules for changing the set A;
π — rules for changing the set P.
The first two sets generate the language of the system W, and τ And ρ carry out its change. Rules α change a lot of knowledge about the subject area. If we consider knowledge as axioms of a formal system (which is formed by the first four elements of W), then the rules α , essentially change the interpretation of the basic symbols and, therefore, the correctly constructed formulas of the language of the semiotic system W.
The first four sets form a formal system FS, elements from five to eight form the rules for changing the formal system. By doing this, they ensure the adaptation of the formal system, “adjusting” it to solve tasks and problems that, within the framework of the system, FS can't be solved.
Thus, the semiotic system (1) can be defined as a composite dynamic system: W=
Therefore, the semiotic system can be given a new interpretation. Composite dynamic system: W=
Rules MFsi = (τ, ρ, α, π), those changing the state of the formal system (control object) are connected by a dependence that exists in the elements of the semiotic triangle (Frege's triangle). This means that applying one of the four rules causes the remaining rules to be applied.
These dependencies are complex, their analytical representation is missing, and this is difficult and is the subject of research into semiotic systems of artificial intelligence. Therefore, it is simpler to use the information approach and information modeling.
Extensions of formal control systems in the form of dynamic components MFsi provide the properties of openness of systems. They create the opportunity to adapt the control object to management influences and changing external conditions.
This, in particular, allows us to significantly expand the possibilities of supporting decision-making in conditions of uncertainty, incompleteness and inconsistency of initial information.
Types of uncertainties when implementing intelligent control
Traditional control methods, including some types of intelligent control, are based on the assumption that state and control models of an object accurately describe its behavior. Methods based on this assumption are included in classical control theory. However, in conditions of increasing volumes, growth of unstructured information and the influence of the external environment, deviations from this condition are characteristic.
Almost any model is a simplified description of a real object, its state and its behavior. The degree of simplification may be acceptable or create uncertainty. In the dynamics of the behavior of a control object, some characteristics of the object can change significantly during its operation. All this creates uncertainties in various models for describing an object and makes it difficult to control it, including intellectual control. The typical control model underlying the control algorithm or the set of established control rules is called nominal.
Under conditions of significant uncertainty, classical methods of control theory are inapplicable or produce unsatisfactory results. In these cases, it is necessary to use special methods of analysis and synthesis of control systems for objects with uncertain models. The first step is to assess the type and value of uncertainty.
There are main types of uncertainties in management models: parametric, functional, structural and signaling.
Parametric uncertainty means that the constant parameters of the model are unknown or imprecisely determined. For example, instead of point values, there are interval values. When moving to information-measuring systems, we can talk about the lack of information certainty of parameters. Therefore, in many cases, the actual values of the parameters may differ significantly from the accepted nominal ones.
Signal uncertainty means that management action or information flows in the control system are affected by interference that significantly changes the nominal signals. Such signals that deviate the control process from the nominal one are called disturbances or interference. The difference is that the interference is passive and only changes the signal-to-noise ratio. The disturbance changes the signal with the same interference.
Modern intelligent control systems must ensure the autonomous operation of many related technical objects. This gives grounds to talk about an intelligent control system (ICS). An intelligent system must solve complex problems, including planning, goal setting, forecasting, etc. For the versatility, adaptation and accuracy of solutions, it is advisable to use multi-purpose intelligent control.
The multi-level architecture of the intelligent control system consists of three levels: conceptual, information and operational (Fig. 1). A system built using this architecture controls the behavior of complex technical objects in conditions of autonomous and collective interaction. The conceptual level is responsible for the implementation of higher intellectual functions
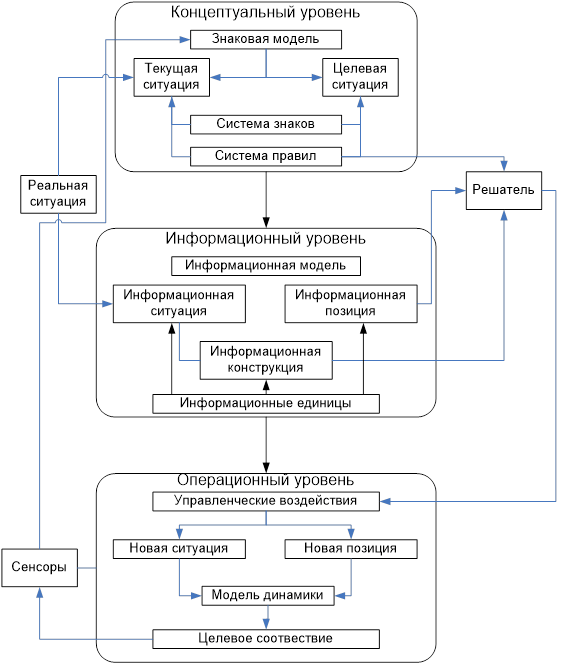
Fig.1. Multi-level intelligent control.
At the conceptual level, a semiotic (sign) representation of knowledge is used and messages are exchanged with other levels. The information and operational levels contain modules that support various intellectual and information procedures and transform them into management.
The main task of management at the conceptual level is the storage, acquisition and use of conceptual knowledge presented in semiotic (symbolic) form.
Composite dynamic system: W=
The acquisition of knowledge is based on a model of the real situation in the external environment. The highest intellectual functions include the functions of setting the main goal and subgoals, planning behavior and distributing influences in the general plan of action.
At the information management level, information modeling problems are solved, the main of which are: construction of an information situation, information position, which correspond to the component FSi. At the information management level, the tasks of constructing an information structure are solved, which is a reflection of the system of rules at the conceptual level and corresponds to the component Mfsi. The linguistic environment of semiotic control at the information level is realized by the use of various information units. Which serve as the basis for constructing an information situation, information position and information design.
At the operational (executive) level, management decisions (managerial influences) are implemented. Managerial influences necessarily change the information position of the control object. Management influences can change, if necessary, the information situation of the control object. At the same time, there is most often no need to change the information situation. The main task of this level is to change the state and position of the control object and report changes to the conceptual level.
Multi-level architecture has a number of features. It includes a number of human cognitive functions. It is based on the use of an information approach to intelligent management.
It is worth noting the difference between intellectual and information technologies. Information technologies perform the functions of supporting intelligent management. The main role is played by intelligent decision-making technologies. They make it possible, along with a decision or in the process of obtaining a decision, to search for new knowledge and accumulate intellectual resources. Information technologies create only information resources. This means that knowledge formalized in an explicit form, once mastered, can become part of experience and part of the knowledge base and be used by it to solve problems and make decisions.
Conclusion
Intelligent control is effective and necessary when managing complex objects for which it is difficult or impossible to find formal operating models. The basis of intelligent management is semiotic models in the first place and information models second. Intelligent control methods are diverse and applicable to technical, cognitive and transportation systems. Intelligent control is widely applied to multi-purpose control. Modern intelligent management is being integrated into cloud platforms and services. When managing distributed organizations and corporations, there is a need to take into account spatial relationships and spatial knowledge. Another problem is the limited number of intelligent technologies for working with tacit knowledge. Technically, the problem of knowledge management is related to the transformation of information resources into intellectual resources and their application in intelligent technologies.
Bibliography
- Pospelov D.A. Applied semiotics and artificial intelligence // Software products and systems. – 1996. – No. 3. – C.10-13
- Tsvetkov V.Ya. Cognitive control. Monograph - M.: MAKS Press, 2017. - 72 p. ISBN 978-5-317-05434-2
- Tsvetkov V.Ya. Information management. — LAP LAMBERT Academic Publishing GmbH & Co. KG, Saarbrücken, Germany 2012 -201с
- Osipov G.S. From situational management to applied semiotics. Artificial Intelligence News. 2002, no. 6.
- Nikiforov V. O., Slita O. V., Ushakov A. V. Intelligent control under conditions of uncertainty. - St. Petersburg: St. Petersburg State University ITMO, 2011.
- McAfee A., Brynjolfsson E. Big data: the management revolution //Harvard business review. – 2012. – No. 90. – pp. 60-6, 68, 128.
- Tsvetkov V.Ya. Markelov V.M., Romanov I.A. Overcoming information barriers // Distance and virtual learning. 2012. No. 11. P. 4-7.
- Forbes L. S., Kaiser G. W. Habitat choice in breeding seabirds: when to cross the information barrier //Oikos. – 1994. – P. 377-384.
- Tsvetkov V. Ya. Intelligent control technology. // Russian Journal of Sociology, 2015, Vol. (2), Is. 2.-р.97-104. DOI: 10.13187/rjs.2015.2.97 www.ejournal32.com.
- Zilouchian A., Jamshidi M. Intelligent control systems using soft computing methodologies. – CRC Press, Inc., 2000
- Alavi M., Leidner D. E. Review: Knowledge management and knowledge management systems: Conceptual foundations and research issues //MIS quarterly. – 2001. – p.107-136.
- Pospelov D.A. Modeling reasoning. Experience in analyzing mental acts. - M.: Radio and Communications, 1989. -184c.
- De Moura L., Bjørner N. Z3: An efficient SMT solver //Tools and Algorithms for the Construction and Analysis of Systems. – Springer Berlin Heidelberg, 2008. – pp. 337-340.
- Rosenberg I.N., Tsvetkov V.Ya. Application of multi-agent systems in intelligent logistics systems. // International Journal of Experimental Education. – 2012. – No. 6. – p.107-109
- Efimov E.I. Solver of intellectual problems - M.: Nauka, Main editorial office of physical and mathematical literature, 1982. - 320 p.
- Pospelov D.A., Osipov G.S. Applied semiotics // Artificial Intelligence News. - 1999. - No. 1.
- Tsvetkov V.Ya. Information uncertainty and certainty in the information sciences // Information technologies. - 2015. - No. 1. -p.3-7
- Tsvetkov V. Ya. Dichotomic Assessment of Information Situations and Information Superiority // European researcher. Series A. 2014, Vol.(86), No. 11-1, pp.1901-1909. DOI: 10.13187/er.2014.86.1901
- Tsvetkov V. Ya. Information Situation and Information Position as a Management Tool // European researcher. Series A. 2012, Vol.(36), 12-1, p.2166- 2170
- Tsvetkov V. Ya. Information Constructions // European Journal of Technology and Design. -2014, Vol (5), No. 3. - p.147-152
- 22. Pospelov D.A. Semiotic models: successes and prospects // Cybernetics. – 1976. – No. 6. – P.114-123.
- 23. Pospelov D.A. Semiotic models in management. Cybernetics. Practical matters. - M.: Nauka, 1984. – P.70-87
- Osipov G.S. et al. Intelligent control of vehicles: standards, projects, implementations // Aerospace instrumentation. – 2009. – No. 6. – pp. 34-43.
- Snytyuk V. E., Yurchenko K. N. Intelligent management of knowledge assessment // VE Snytyuk, KN Yurchenko. − Cherkassy. – 2013.
- Pugachev I. N., Markelov G. Ya. Intelligent management of urban transport systems // Transport and service: collection. scientific works.–Kaliningrad: Publishing house named after I. Kant. – 2014. – No. 2. – pp. 58-66.
- Atiencia V., Diveev A.I. Synthesis of an intelligent multi-purpose control system //Modern problems of science and education. – 2012. – No. 6.
- Gribova V.V. et al. Cloud platform for the development and management of intelligent systems // International scientific and technical conference “Open semantic technologies for the design of intelligent systems” (OSTIS-2011).-Minsk: BSUIR. – 2011. – P. 5-14.
TOPIC 13. INTELLIGENT CONTROL SYSTEMS
A new generation of systems - intelligent systems (IS) - has brought to life other principles for organizing system components; new concepts, terms, and blocks have appeared that were not previously encountered in developments and, therefore, in the scientific literature.
Intelligent systems are capable of synthesizing a goal, making a decision to act, providing action to achieve the goal, predicting the values of the parameters of the result of the action and comparing them with real ones, forming feedback, adjusting the goal or control
Figure 13.1 shows a block diagram of the IS, where two large blocks of the system are highlighted: goal synthesis and its implementation.
In the first block, based on the active assessment of information received from the sensor system, in the presence of motivation and knowledge, a goal is synthesized and a decision to take action is made. Active evaluation of information is carried out under the influence of trigger signals. Variability of the environment and the system's own state can lead to a need for something (motivation), and if knowledge is available, a goal can be synthesized.
A goal is understood as an ideal, mental anticipation of the result of an activity. By continuing to actively evaluate information about the environment and the own state of the system, including the control object, when comparing options for achieving the goal, you can make a decision to take action.
Further, in the second block, a dynamic expert system (DES), based on current information about the environment and its own state of the IS, in the presence of a goal and knowledge, carries out an expert assessment, makes a decision on management, predicts the results of the action and develops management.
The control presented in encoded form is converted into a physical signal and sent to actuators.
The control object, receiving a signal from the actuators, carries out one or another action, the results of which, presented in the form of parameters, are sent to the diesel power station via feedback circuit 2, where they are compared with the predicted ones. At the same time, the parameters of the result of the action, interpreted in accordance with the properties of the goal and entering block I, can be used for an emotional assessment of the achieved result: for example, the goal has been achieved, but the result is not liked.
If the goal is achieved in all respects, then management is reinforced. Otherwise, control correction occurs. When the goal is unattainable, the goal is adjusted.
It should be noted that with sudden changes in the state of the environment, or the control object, or the system as a whole, it is possible to synthesize a new goal and organize its achievement.
The IS structure, along with new elements, contains traditional elements and connections; a dynamic expert system occupies a central place in it.
Block 1 - goal synthesis Block II - goal implementation
Figure 13.1 – IC block diagram
Formally, the IS is described by the following six expressions:
T X S M T ;
T M S ST ;
C T S R T;
T X= (A T)X T+(B T)U T;
T Y = (D T)X T;
T R Y WITH T ,
where T is a set of moments in time;
X, S, M, C, R and Y - sets of states of the system, environment, motivation, goal, predicted and real result;
A, B and D - parameter matrices;
Intelligent conversion operators using knowledge.
This description combines representations of system objects in the form of a set of values, or a set of statements, or some other forms.
The dynamic properties of an IS can be described in state space. Intellectual operators that implement perception, representation, concept formation, judgments and inferences in the process of cognition are a formal means of processing information and knowledge, as well as decision-making. All these aspects should form the basis for the construction of DES operating in real time and the real world.
A dynamic expert system is a complex entity capable of assessing the state of the system and the environment, comparing the parameters of the desired and actual results of an action, making decisions and developing management that contributes to achieving the goal. To do this, the DES must have a stock of knowledge and have methods for solving problems. The knowledge transferred to the expert system can be divided into three categories:
1) conceptual (at the level of concepts) knowledge is knowledge embodied in the words of human speech or, more specifically, in scientific and technical terms and, naturally, in the classes and properties of environmental objects behind these terms. This also includes connections, relationships and dependencies between concepts and their properties, abstract connections also expressed in words and terms. Conceptual knowledge is the sphere of mainly fundamental sciences, given that the concept is the highest product of the highest product of matter - the brain;
2) factual, subject knowledge is a set of information about the qualitative and quantitative characteristics of specific objects. It is with this category of knowledge that the terms “information” and “data” are associated, although this use of these terms somewhat belittles their meaning. Any knowledge carries information and can be represented in the form of data; factual knowledge is what computing machines have always dealt with and what they still deal with most of all. The modern form of data accumulation is usually called databases. Of course, to organize databases and search for the necessary information in them, one must rely on conceptual knowledge;
3) algorithmic, procedural knowledge - this is what is usually called the words “skill”, “technology”, etc. In computing, algorithmic knowledge is implemented in the form of algorithms, programs and subroutines, but not all of them, but those that can be transferred from hands in hand and used without the participation of the authors. This implementation of algorithmic knowledge is called a software product. The most common forms of software products are application software packages, software systems and others focused on a specific area of application of DES. The organization and use of application software packages is based on conceptual knowledge.
It is clear that conceptual knowledge is the higher, defining category of knowledge, although, from a practical point of view, other categories may seem more important.
This is probably why conceptual knowledge is rarely embodied in a form that can be processed by computers. And if it is embodied, it is most often incomplete and one-sided. In most cases, a person remains the bearer of conceptual knowledge. This slows down the automation of many processes.
Representations of conceptual knowledge, or more precisely, systems that implement all three categories of knowledge, but highlight conceptual knowledge to the fore and work on the basis of its intensive use, are called knowledge bases.
The creation and widespread use of knowledge bases in information systems is one of the most pressing tasks. We will call the conceptual part of the knowledge base a domain model, the algorithmic part a software system, and the factual part a database.
The next function of the DES is problem solving. A problem can be solved by a machine only if it is formally posed - if a formal specification is written for it. The latter must rely on some knowledge base. The domain model describes the general environment in which the task arose, and the specification describes the content of the task. Taken together, they make it possible to establish which abstract connections and dependencies, in what combinations and in what sequence should be used to solve the problem.
Application programs provide the specific tools behind these dependencies and also contain algorithms for solving the resulting equations. Finally, the database supplies all or part of the input data for executing these algorithms; the missing data must be contained in the specification.
These three parts of the knowledge base correspond to three stages of solving the problem:
1) construction of an abstract solution program (including the emergence of the problem, its formulation and specification);
2) translation of the problem into a suitable machine language;
3) broadcast and execution of the program.
The construction of an abstract program is associated with the representation and processing of conceptual knowledge in an IS and, by definition, is the property of artificial intelligence.
Artificial intelligence is associated with the processing of texts, oral messages in natural language, with the analysis and processing of information (recognition of all types of images, proof of theorems, logical inference, etc.).
The functions of the DES are also the assessment of the results of solving a problem, the formation of parameters for the future result of an action, making decisions about management, developing management and comparing the parameters of the desired and actual results. This involves modeling processes to assess the possible consequences and correctness of solving the problem.
Note that in real cases there is a problem of describing the objects under study. Such a description is not rightfully considered part of the task specification, since, as a rule, many tasks are posed regarding one object, which, naturally, must be taken into account when forming a knowledge base. In addition, it may turn out that the problem that has arisen cannot be solved completely automatically, for example, due to the incompleteness of the specification or description of the object.
Therefore, in the IS it is advisable at certain stages to have an interactive mode of working with DES. We must remember that the domain model describes the general situation (knowledge), and the specification describes the content of the task. Very important problems are the creation of a unified software environment and the synthesis of algorithms directly based on the problem statement.
Depending on the goal that the IS faces, the knowledge base, algorithms for solving a problem, making a decision, and developing control can, naturally, have a different representation, which, in turn, depends on the nature of problem solving. Accordingly, three types of DES can be seen. The structure of the DES of the first type is shown in Figure 13.2.

Figure 13.2 – Structure of DES of the first type
Here it is assumed that conceptual and factual knowledge accurately reflect the processes and information related to a certain subject area.
Then the solution to the problem arising in this area will be obtained on the basis of rigorous mathematical methods, in accordance with the formulation and specification. The results of the decision study and forecast are used to obtain an expert assessment and make a decision on the need for management. Then, based on a suitable control algorithm available in the knowledge base, a control action is generated.
The effectiveness and consistency of this impact, before it reaches the control object, is assessed using a mathematical simulation model. The evaluation must be performed faster than the actual processes in the IS.
However, DES that implement decision making are complex software systems designed for automatic decision making or to assist decision makers, and in the operational management of complex systems and processes, as a rule, they work under strict time constraints.
Unlike DES of the first type, designed to find an optimal solution and based on strict mathematical methods and optimization models, DES of the second type are mainly focused on solving difficult to formalize problems in the absence of complete and reliable information (Fig. 13.3). Here, expert models are used, built on the basis of the knowledge of experts - specialists in a given problem area, and heuristic methods for finding a solution.
One of the main problems when designing a DES of the second type is the choice of a formal apparatus for describing decision-making processes and building on its basis a decision-making model that is adequate to the problem area (semantically correct). Production systems are usually used as such a device. However, the main research is carried out in the context of an algorithmic (deterministic) interpretation of the production system with its inherent sequential scheme for finding a solution.
The resulting models are often inadequate to real problem areas characterized by non-determinism in the process of finding a solution. The way out of this situation is parallelism in search.
In reality, one should focus on combining DES of the first and second types into a calculation-logical DES of the third type, where the knowledge base combines a description in the form of strict mathematical formulas with expert information, and also, accordingly, mathematical methods for finding a solution with non-rigorous heuristic methods, with the weight of one or the other the component is determined by the possibility of adequately describing the subject area and the method of finding a solution (Fig. 13.4).

Figure 13.3 – Structure of second-level diesel power station
When developing DES, the following problems arise:
1. determining the composition of the knowledge base and its formation;
2. development of new and use of known theories and methods to describe information processes in information systems;
3. development of ways to present and organize the use of knowledge;
4. development of algorithms and software with parallelization and use of “flexible logic”;
- finding suitable computing environments for implementing parallel algorithms in the formation of DES.

Figure 13.4 – Structure of third-level diesel power station
Along with the above, it is important to note that DES must have the ability to adapt to a dynamic problem area, the ability to introduce new elements and connections into the description of situations, change the rules and strategies for the functioning of objects in the process of decision-making and management development, work with incomplete, unclear and contradictory information and etc.
Dynamic expert systems operate as part of ISs that have feedback, and therefore it is important to ensure the stable operation of such ISs.
From a traditional point of view, we can assume that the duration of the reaction of the diesel power plant to input influences, i.e. the time spent processing input information and developing a control action is a pure delay. Based on frequency analysis, it is possible to evaluate the change in the phase properties of the system and thereby determine the stability margin. If necessary, you can correct the system using filters.
However, from the point of view of classical control theory, ISs are multi-object, multi-connected systems, the stability analysis of which using conventional methods is very difficult.
Currently, the theory of robust control (-control theory, -control) is one of the intensively developing branches of control theory. Relatively young (the first works appeared in the early 80s), it arose from pressing practical problems of synthesizing multidimensional linear control systems operating under conditions of various kinds of disturbances and changes in parameters.
You can approach the problem of designing control of a real complex object operating under conditions of uncertainty in a different way: do not try to use one type of control - adaptive or robust. Obviously, one should choose the type that corresponds to the state of the environment and the system, determined from the information available to the system. If, during the operation of the system, it is possible to organize the receipt of information, it is advisable to use it in the management process.
But until recently, the implementation of such combined control encountered insurmountable difficulties in determining the algorithm for choosing the type of control. The progress achieved in the development of artificial intelligence problems makes it possible to synthesize such an algorithm.
Indeed, let us set the task: to design a system that uses adaptive and robust control and selects the type of control based on artificial intelligence methods. To do this, we will consider the features of both types and, taking into account their specific qualities, we will determine how to build a combined control system.
One of the main concepts in the theory of robust control is the concept of uncertainty. Object uncertainty reflects the inaccuracy of the object model, both parametric and structural.
Let us consider in more detail the forms of specifying uncertainty in robust control theory using a simple system - with one input and one output (Figure 13.5).
The signals have the following interpretation: r - master input signal; u - input signal (input) of the object; d - external disturbance; y is the output signal (output) of the object being measured.

Figure 13.5 – System with one input and one output
In control theory, uncertainty is conveniently specified in the frequency domain. Let us assume that the transfer function of a normal object is P, and consider a perturbed object whose transfer function is
|
|
where W is a fixed transfer function (weight function);
–arbitrary stable transfer function satisfying the inequality .
We will call such a disturbance admissible. Below are some options for uncertainty models:
| (1+W)P; P+W; P/(1+WP); P/(1+W). |
Appropriate assumptions must be made for the quantities and W in each case.
The uncertainty of input signals d reflects the different nature of external disturbances acting on the object and the controller. An indeterminate object can thus be considered as a set of objects.
Let us choose a certain characteristic of feedback systems, for example stability. Controller C is robust with respect to this characteristic if any of the set of objects defined by uncertainty has it.
Thus, the concept of robustness implies the presence of a regulator, a set of objects and the fixation of a certain characteristic of the system.
In this work we will not touch upon the entire set of problems solved within the framework of control theory. Let us touch only on the problem of minimal sensitivity: constructing a controller C that stabilizes a closed system and minimizes the influence of external disturbances on output y, in other words, minimizes the norm of the matrix of transfer functions from external disturbances to output y.
One of the features of solving this, and indeed the entire set of robust control problems, is the fact that in advance, in the process of designing the controller, we lay down restrictions on the input influences and the uncertainty of the object in the form of inequalities.
During the operation of a robust system, information about uncertainties in the system is not used for control.
Naturally, this leads to the fact that robust systems are conservative and the quality of transient processes sometimes does not satisfy the developers of these systems.
Like a robust adaptive control system, it is built for objects, information about which or about the impacts on which is not available at the beginning of the system’s operation. Most often, the adaptation property is achieved through the formation, explicitly or implicitly, of a mathematical model of an object or input influence.
This distinguishes both search adaptive control, which is based on the search and retention of the extremum of the control quality indicator, and non-search, which is based on compensation for the deviation of actual changes in controlled coordinates from the desired changes corresponding to the required level of the quality indicator. Next, according to the refined model, the adaptive controller is adjusted.
Thus, the main feature of adaptive control systems is the ability to obtain information during operation and use this information for control.
Moreover, adaptive systems always use a priori information about the uncertainty in the system. This is the fundamental difference between the adaptive approach and the robust one.
Let's consider the simplest adaptive control system that provides tracking of the input signal in the presence of noise at the object input (Figure 13.6).

Drawing. 13.6–Adaptive control system
The formal difference from the circuit in Figure 13.5 is the adaptation block A, which, based on the output signal of the object and the signal characterizing the given quality, generates a signal for adjusting the coefficients of the adaptive controller.
Bearing in mind the disadvantages of each of the regulators, it is advisable to try to use their advantages by proposing a combined scheme for controlling the object. An adaptive system, using an adaptation block, generates some information about the state of the external environment. In particular, in the case under consideration, it is possible to obtain information about the external disturbance d. The control algorithm C a corresponds to the current state of the external environment, according to the criterion laid down in the adaptation block. But the adaptive system requires that the input signal r have a fairly wide frequency range, and imposes strict restrictions on the value and frequency spectrum of the external disturbance signal d. Therefore, adaptive systems can operate only in narrow ranges of the input signal r and external disturbance d. Outside these ranges, the adaptive system has poor control quality and may even lose stability.
The properties of robust and adaptive control discussed above lead to the conclusion that during the operation of the system, in some cases it is beneficial to use robust control, in others - adaptive, i.e. be able to combine control depending on the state of the external environment.
Combined control. The main question when designing combined control systems is how, on the basis of what knowledge (information) to select one or another type of control.
The greatest opportunities for this are provided by artificial intelligence methods. Their advantage over simple switching algorithms is the use of a wide range of data and knowledge to form an algorithm for selecting the type of control.
If we formally combine the circuits shown in Figures 13.5, 13.6, we obtain a combined control circuit (Figure 13.7).
As can be seen from the figure, the control signal must switch from a robust controller to an adaptive one and vice versa - as the environment changes during the operation of the system. Using the methods of the theory of intelligent systems, it is possible to ensure a transition from one type of control to another depending on the operating conditions of the system.
|
|

Figure 13.6 – Combined control scheme
Let's first consider what information can be used to operate the intelligent unit of the system. As is known, systems with one input and one output are well described in the frequency domain. Therefore, it is natural to use frequency characteristics to organize the decision-making process when choosing the type of control.
As mentioned above, the frequency response of a system with robust control corresponds to the worst combination of parameters in the region of uncertainty. Therefore, robust control can be taken as one of the boundaries of the selected control.
The other limit is determined by the capabilities of the system under study (drive speed, power supply, etc.). Between these two boundaries is an area where it makes sense to use adaptive control.
|
|

Figure 13.7 – Combined control scheme
Since the adaptive algorithm is sensitive to the initial stage of the system’s operation, at this stage it is advisable to use robust control, which is quite insensitive to the rate of change of external interference. But its disadvantage is the long duration of transient processes and large permissible values of the output coordinate under the influence of interference.
After some time, it makes sense to switch from robust control to adaptive control.
Adaptive control allows you to more accurately track the input signal in the presence of interference information. Adaptive control is demanding on the richness of the spectrum of the input signal, and, for example, with slowly changing signals, adaptation processes may fail or be greatly slowed down. In such a situation, it is necessary to switch again to robust control, which guarantees the stability of the system.
From the above it follows that for the system to operate it is necessary to have information about the frequency spectrum of the useful interference signal and the signal-to-noise ratio.
In addition, preliminary information is required about the frequency spectrum on which the adaptive system operates, and about the particular characteristics of the control object at the boundaries of the uncertainty region. From this information, you can create a database into which information specific to each class of objects is entered in advance. Information about the frequency spectrum of the useful signal, interference and the signal-to-noise ratio enters the database as the system operates and is constantly updated.
The contents of the database can be used in a knowledge base, which is formed in the form of rules. Depending on the specific properties of the system, you can set the switching between two types of control. The required rules are formed in one of the logical systems suitable for the case under consideration.
Having databases and knowledge, it is possible to develop a decision-making mechanism that will ensure the correct choice of control type depending on the operating conditions of the system.
|
|

Figure 13.8 – Block diagram of a system with an intelligent unit (IB)
The intelligent part of the system operates discretely, at specified time intervals. Figure 13.8 shows a block diagram of a system with an intelligent information security unit that allows selection of the control type.
The signal r and the measured, output signal of the object y are received at the input of the block. In the information pre-processing block BPOI, based on the time characteristics of the signals r(t), y(t), the frequency characteristics of the input signal r(w) and the external disturbance d(w), the relative position of the spectra r(w) and d(w) and the characteristic signal-to-noise ratio values r(w)/d(w). All this information goes into the database. The BPR decision-making block, using the generated knowledge base and database data, develops a decision in accordance with which one of the control types is activated. At the next interval, the process is repeated using new data.
UDC 004.896
I. A. Shcherbatov
INTELLIGENT CONTROL OF ROBOTIC SYSTEMS UNDER CONDITIONS OF UNCERTAINTY
Introduction
Intelligent control is the use of artificial intelligence methods to control objects of various physical natures. In the field of controlling robotic systems, artificial intelligence methods are most widely used. This is due, first of all, to the autonomy of robots and the need for them to solve informal creative problems in conditions of incomplete information and various types of uncertainty.
Until recently, this class of tasks remained the prerogative of natural intelligence: the operator of the control object, the engineer, the scientist, i.e., the human. Modern advances in the field of automatic control theory, intelligent methods for formalizing semi-structured tasks and controlling complex technical systems make it possible to implement very complex robotic systems, which include mobile robotic platforms, flexible automated lines and android robots.
Robotic systems operate under conditions of incomplete input information, when the fundamental impossibility of measuring a number of parameters imposes significant restrictions on the control program. This leads to the need to develop a base of algorithms that make it possible to calculate unmeasured parameters based on indirect signs and measurable indicators.
The uncertainty of the external environment in which the robotic system operates forces the control system to include various types of compensators, modules for adaptation, accumulation and ranking of information.
Formulation of the problem
The purpose of the research was to develop approaches to the construction of intelligent control systems for robotic systems that are invariant with respect to the specifics of operation, taking into account the incompleteness of input information and various types of uncertainty.
To achieve this goal, it is necessary to solve a number of interrelated problems: analyze the architectures of intelligent control systems for robotic systems; develop a generalized algorithm for situational identification of a robotic system; develop a generalized diagram of the robotic system control system; to develop intelligent control systems for a handling robot, a mobile robotic platform and a flexible automated line.
Research methods
During the research, methods of the general theory of automatic control, the theory of fuzzy sets, neural networks, system analysis, and the theory of expert assessments were used.
Location of the robotic system in the external environment
To implement intelligent control algorithms, the primary task is the current identification of the situation in which the robotic system is located. To solve this problem, a block diagram of the situational identification system has been developed (Fig. 1).
The technical vision and sensory sensing unit is designed to determine changes in the state of the external environment and present a sensory map of the environment for further processing. The sensory map of the environment is an image of the situation in which the robot is located at the current moment in time. The time interval for constructing a sensory map is selected based on the specifics of the subject area.
Knowledge base
Operator
Intellectual
interface
Identifier
algorithms
Organs of technical vision and sensory sensation
External environment
Executive
mechanisms
Rice. 1. Block diagram of the situational identification system
Working memory, by analogy with expert systems, is designed to process information coming from sensors and processed using the existing database of algorithms and knowledge base (KB) of the robotic system.
The base of algorithms includes algorithms for preprocessing the sensor map (digital signal processing, recognition of sound patterns and images), calculation of unmeasured parameters (functional dependencies on measured parameters), restoration of information completeness (checking knowledge for completeness and inconsistency, adaptation of knowledge taking into account non-stationarity and variable external conditions), mathematical operations, etc.
The knowledge base is a complex hierarchical structure containing a priori information about the external environment, laid down at the training stage, complete and consistent knowledge acquired by the robot in the process of functioning and perception of the external environment. Knowledge in the knowledge base is ranked according to criteria of relevance and updated taking into account changes in the specifics of the robot’s functioning based on knowledge adaptation algorithms.
The most important block is the situation identifier. It is this block that is responsible for correct recognition of the image of the situation based on the sensory map. The resultant information of this block is decisive for choosing a control program for the robotic system.
And finally, the intelligent interface, which is necessary to communicate with the operator. The operator monitors the functioning of the robotic system, as well as monitors the process to achieve the set goals. As a rule, communication between a robot and an operator should occur using a natural language interface in a limited subset of natural language.
Structure of a robotic system control system under conditions of uncertainty
The implementation of algorithms and programs for intelligent control of robotic systems under conditions of uncertainty is associated with a number of significant difficulties.
The complexity of algorithms for preprocessing input information and the structural uncertainty of the behavior model of the robotic system itself determine the redundancy of the structure of the intelligent control system.
To solve the problem of controlling a robot under conditions of uncertainty, the following architecture of the intelligent control system was designed (Fig. 2).
A situational identification system (SIS) should be part of any intelligent control system for a robotic system. The intelligent control device (ICD) contains a control unit and a control program selection unit (CPSU). The purpose of this block is to develop a control action for a system of electric drives (ED) acting on the mechanical system (MS) of the robot.
Rice. 2. Block diagram of the intelligent control system for the robotic system
Control systems for industrial manipulators
Traditional control systems for industrial manipulators are divided into several classes. The first class of systems is program control systems.
The system of continuous control of the working body of the manipulator involves aligning the manipulator to the reference model. In this control algorithm, losses in the manipulator MS are not taken into account and it is assumed that all forces developed by the drives are transferred to the working element.
The programmable force control system in the working body is used to control not only the force vector, but also the position vector of the working body. The system of independent control of movement and force in the working body of the manipulator for various degrees of mobility has two control loops with feedback: by position and by force.
In the system of coupled control of movement and force in the working body of the manipulator, the task for the position vector of the working body is adjusted according to the current value of the force vector. This means that when the working body moves, the magnitude of its stroke is adjusted according to the force of influence on the external environment.
Adaptive control systems are used when the following operations are performed: picking up an arbitrarily located or moving object, arc welding of seams with a variable position, avoiding moving and unexpected obstacles. Adaptive systems with associative memory are used for this purpose.
Robust control systems are also used to control industrial manipulators, which are currently in wide practical use.
Implementation of intelligent control
The problem of functioning of a robotic system under conditions of uncertainty is multifaceted.
Let us consider the problem of planning the behavior of a robotic system under conditions of uncertainty. To solve this problem, it is most appropriate to use the technology of dynamic expert systems. The knowledge base of such an expert system is adjusted over time. If a production rule base is used, then the composition of the production rules is continuously examined for completeness and consistency. In addition, due to adaptation algorithms, outdated and outdated rules are updated and replaced. At the same time, special attention is paid to the issues of training an expert system without a teacher (self-training) due to the fact that monitoring the system by a highly qualified specialist is not economically feasible.
The self-learning or self-tuning block of the knowledge base of the expert system requires careful study at the design stage of the intelligent control system of the robotic system.
my. The effectiveness of solving the problem often depends on the quality of execution of this stage of design work. It should include subsystems for assessing the completeness and inconsistency of knowledge, assessing the quality of management and correcting knowledge.
Chronologically, the next stage after planning behavior may be the problem of issuing control commands to a robotic system in natural language. To create a natural language interface, in our opinion, the most suitable implementation tool is the theory of fuzzy sets.
With the help of linguistic variables containing a certain, pre-described term set, a description of the subject area, a limited system of commands and objects that influence the robotic system and change under its influence is made. The methods of phasification and dephasification used in this case, as well as fuzzy logical inference algorithms, have a significant impact on the accuracy of control actions and the speed of operation of the robotic system.
And finally, the use of neural network control systems for robotic systems. The main advantage of a neural network is that there is no need to know or create a mathematical model of an object, since the neural network is a universal fuzzy approximator.
The object (robotic system) acts as a “black box”. A neural network can act as a reference model for a controlled robotic system. It should be noted that this must be a learning multilayer neural network (object identifier). The neural network model is adjusted to the control object based on the mismatch between the output signals of the object and the model. It also forms a training sample for adjusting and adjusting the control device in accordance with the selected quality criterion.
Conclusion
The analysis made it possible to synthesize the architecture of an intelligent control system for robotic systems, invariant with respect to the specifics of operation. The developed situational identification algorithm allows the construction of highly informative sensory maps of the external environment. The main approaches to the formation of intelligent control systems for robotic systems are described. The directions for the future development of the most effective artificial intelligence methods used for the implementation of control devices are shown.
BIBLIOGRAPHY
1. Yurevich E. I. Fundamentals of robotics. - St. Petersburg: BHV-Petersburg, 2007. - 416 p.
2. Manipulation systems of robots / ed. A. I. Korendyaseva. - M.: Mechanical Engineering, 1989. - 472 p.
3. Burdakov S. F. Synthesis of robust regulators with elastic elements: collection of articles. scientific tr. - No. 443. Mechanics and control processes. - St. Petersburg: St. Petersburg State Technical University, 1992.
4. Protalinsky O. M. Application of artificial intelligence methods in the automation of technological processes: monograph. - Astrakhan: ASTU Publishing House, 2004. - 184 p.
The article was received by the editor on January 13, 2010
INTELLECTUAL MANAGEMENT OF ROBOTICS SYSTEMS IN THE CONDITIONS OF UNCERTAINTY
I. A. Shcherbatov
The purpose of the given work is a formation of approaches to construction of intellectual control systems of robotics systems, invariant in relation to specificity of the functioning, considering incompleteness of the entrance information and various kinds of uncertainty. The analysis, allowed to synthesize the architecture of an intellectual control system of robotics systems invariant in relation to the specificity of functioning is carried out. The developed algorithm of situational identification allows to build up good touch cards of the environment. The basic approaches to the formation of intellectual control systems of robotics systems are described. Directions of perspective development of the most effective methods of the artificial intelligence applied to implementation of actuation devices are shown.
Key words: robotics system, the robot, intellectual management, structural uncertainty, incompleteness of the information, touch card, neural network, the theory of the indistinct sets, self-trained expert system.
Concepts: intelligent system (IntS), intelligent control system (IntSU)
The concept of “intelligent system” is interpreted differently by different researchers. Let's consider the main ones, including accompanying explanations.
Intelligent system is an information and computing system with intelligent support for solving problems without the participation of an operator (decision maker - decision maker). Intelligent system is an information and computing system with intelligent support for solving problems with the participation of an operator - decision maker. Basic intelligent technologies, including artificial neural networks (ANN), genetic algorithms, fuzzy logic, can be effectively used in the creation of control systems. At the same time, the feasibility of their use is determined by the ability to implement distributed calculation schemes, which makes it possible to expand the search space without significantly increasing the complexity of the necessary calculations; the ability to describe control processes using “simple” language, close to natural; the possibility of non-analytical representation of nonlinear control objects and description of processes characterized by ambiguity and a large number of special situations; the ability to quickly search in the space for solutions to poorly formalized problems.
Intelligent systems These are knowledge-based systems. When processed on a computer, knowledge is transformed similarly to data: 1) Knowledge in human memory as a result of thinking. 2) Material carriers of knowledge (textbooks, teaching aids). 3) Field of knowledge - a conditional description of the main objects of the subject area, their attributes and patterns connecting them. 4) Representation of knowledge based on any model (production, semantic, frame or other). The production model or rule-based model allows knowledge to be represented in the form of sentences like "If , That" A semantic network is a directed graph whose vertices are concepts and whose arcs are relationships between them. A frame is a data structure for representing some conceptual object. 5) Knowledge base on computer storage media. When using the production model, the knowledge base consists of a set of rules. The program that controls the enumeration of rules is called an inference engine (reasoning engine, inference engine, deductive engine, interpreter, rule interpreter, solver). The output machine works cyclically. In each cycle, it looks at existing facts from the working memory (database) and rules from the knowledge base, and then compares them. The set of selected rules constitutes the so-called conflict set (that is, in a specific situation several rules can be applied at once). To resolve a conflict, the inference engine has a criterion by which it selects a single rule, after which it is triggered. This is expressed in the entry of facts (recommended actions) that form the conclusion of the rule into working memory or in changing the criterion for selecting conflicting rules. If the conclusion of the rule includes the name of an action, then it is triggered. The inference engine is based on the principle of modus ponens, which is interpreted as follows: “If statement A is known to be true and there is a rule of the form “if A then B,” then statement B is true.”
Under intelligent systems understand any biological, artificial, or formal system that exhibits the ability to engage in goal-directed behavior. The latter includes the properties (manifestations) of communication, knowledge accumulation, decision making, learning, adaptation. Artificial intelligence research is based on a knowledge approach. Reliance on knowledge is the basic paradigm of artificial intelligence. In the work, interpretations of knowledge are combined into four groups (or levels): psychological, intellectual, formal-logical and information-technological. Psychological interpretation of knowledge - mental images, mental models. Intellectual interpretation of knowledge is a set of information about a certain subject area, including facts about objects of a given subject area, the properties of these objects and the relationships connecting them, descriptions of processes occurring in a given subject area, as well as information about ways to solve typical problems. Formal-logical interpretation is formalized information about a certain subject area, used to obtain (infer) new knowledge about this subject area using specialized procedures. Information technology interpretation - structural information stored in computer memory and used in the operation of intelligent programs.
In the works of D.A. Pospelov and his colleagues described the following conceptual properties of knowledge: internal interpretability, understood as the presence of unique names identifying each information unit; structure, which determines the possibility of recursive nesting of individual information units into each other; external connectivity, defining the possibility of establishing functional, casual and other types of relationships between information units; scalability, characterizing the possibility of introducing various metrics to record quantitative, ordinal and other relationships of information units; activity, reflecting the ability to initiate certain appropriate actions when new information appears.
Intelligent information system(or knowledge-based system) is based on the concept of using a knowledge base to generate options for solving applied problems of various classes, depending on the specific information needs of users. The main purpose of building such systems is to identify, study and apply the knowledge of highly qualified experts to solve complex problems that arise in practice. When building knowledge-based systems, knowledge accumulated by experts in the form of specific rules for solving certain problems is used. This direction aims to imitate the human art of analyzing unstructured and semi-structured problems.
In the applied theory of intelligent systems (IntS), the control system is considered only in close interaction with the external world surrounding it, and the intelligent system is interpreted as a set of active subjects and objects (subjects) opposing them, generated either by the situational possibility of the active existence of the subject, or by the target task of some systemic or an extra-systemic subject, and all the elements of any nature that make up the intellectual system are under the influence of the external world common to them.
In the work of A.V. Timofeev and R.M. Yusupov said that IntSU includes elements of artificial intelligence that allow one to form concepts and accumulate knowledge, plan behavior and make decisions in uncertain conditions, recognize images and form a model of the environment. Introduction of intelligence elements into automatic control systems (ACS) significantly expands their functionality compared to adaptive self-propelled guns. As a result of intellectualization, self-propelled guns acquire the ability to solve certain types of intellectual tasks that were usually assigned to humans. Therefore, IntSU are increasingly used in cases where the situation does not allow (does not justify) the direct participation of a human operator in the control process or when it is necessary to reduce the operator’s labor intensity when the control object is operating in normal modes.
The need for intellectualization of automatic control systems usually arises in cases where control objects are complex (for example, objects with nonlinear dynamics operating under conditions of uncertainty), and their description and interaction with the environment is difficult to structurize and formalize. The incompleteness of the description is manifested both in the a priori uncertainty of the model of the object and the environment, and in the uncertainty and diversity of management goals. Often the description of the behavior of such objects is vague and contains qualitative information (expert assessments, plausible conclusions, membership functions). Solving control problems in such conditions is impossible without the use of artificial intelligence methods, that is, without the intellectualization of self-propelled control systems.
Thus, the intellectualization of automatic control systems comes down to the representation and processing of knowledge about the environment, object and control system using the necessary means of learning and adaptation. This knowledge and tools make it possible to refine the model of the control object and the environment and give the ACS fundamentally new properties, similar to the intellectual abilities of a human operator or expert. The characteristic features of IntSU are their ability to learn and self-learn through the formation of knowledge, to synthesize and identify patterns of behavior, to recognize and analyze situations, self-organization and adaptation in relation to various factors. These abilities make it possible to compensate for various factors of internal and external uncertainty that arise during the operation of the ACS, and thereby improve or optimize the quality of control.
Following , IntSU we will call such a system in which knowledge about the unknown characteristics of the control object and the environment is formed in the process of learning and adaptation, and the information obtained is used in the process of automatically making control decisions so that the quality of control improves. Note that the processes of learning and adaptation can occur either in isolation from the control process (for example, in the training mode with a teacher, usually played by a human operator or expert), or directly in the process of automatic control in real time.
Let us consider the features of the functional structure of typical representatives of the class of intelligent control systems, interpreting them in relation to technological control objects (units, machines, machine complexes).
Program No. 14 of fundamental research of OEMMP RAS
“ANALYSIS AND OPTIMIZATION OF THE OPERATION OF MULTI-LEVEL, INTELLIGENT AND NETWORK CONTROL SYSTEMS UNDER CONDITIONS OF UNCERTAINTY”
1. Rationale for the Program
1.1. Scientific and practical significance
Intensive development of technology (networking, miniaturization of computers, increasing their speed, etc.) places new demands on modern control systems and opens up new opportunities both at the level of embedded control systems (at the level of large dispatch centers) and at the network level (communications). network, group) interaction of decentralized multi-agent systems. Control systems are increasingly acquiring the character of information management systems and are being studied at the intersection of control, computing and communication theories. Thus, taking into account the properties of communication channels is necessary, for example, in decentralized (multi-agent) systems, and the characteristics of the built-in computer are important when implementing in multi-level control systems such intelligent functions as technical vision, action planning, training, multi-criteria decision making, reflection and etc. In particular, the intellectualization of management is intended to increase the degree of autonomy of the functioning of systems, when the lack of quantitative models of dynamics or disturbances in the functioning of the control object, causing a loss of adequacy of quantitative models (for example, equations describing the evolution of a complex system), strengthen the role of qualitative ones (the so-called “ knowledge”, for example, logical-linguistic) models of the object and environment used at the upper levels of the control system.
The program is aimed at solving fundamental problems arising in the priority areas of science, technology and engineering of the Russian Federation. The task is set to obtain new fundamental and applied results in the field of control theory of complex technical, human-machine and other systems, taking into account the uncertainty and lack of initial information, including: the theory of analysis and synthesis of stochastic systems, the theory of creating motion control systems and technological processes, with current diagnostics and monitoring of technical condition, as well as the theory of creating automated design systems and intelligent control based on modern information technologies.
Due to the diversity of use of control theory, analysis and optimization in various applications (transport, logistics, manufacturing, aviation and space systems, submarines and surface ships, etc.), it is necessary to take into account a large number of complexity factors, such as:
· multi-level management,
· decentralization,
· nonlinearity,
· multiplicity,
· distribution of parameters,
· different scale of processes in space and time,
· high dimension,
· heterogeneity of description of subsystems,
· multi-mode,
· presence of impulse influences,
· presence of coordinate-parametric, structural, regular and singular disturbances,
· use of deterministic and probabilistic models for describing the uncertainty of information about the state vector and parameters of the system, about the properties of measurement errors and the external environment,
presence of delay effects in control or object,
· general structural complexity of modern control systems.
To achieve the set goal and solve the main tasks, the Program includes research and development in the following main areas:
1. Analysis and optimization of functioning in different time scales of multi-level control systems with incomplete information.
2. Management and optimization in multi-level and decentralized systems of organizational and technical nature.
2.1. Management and optimization in network-centric systems.
2.2. Intelligent control of moving objects.
2.3. Modeling and optimization of multi-level real-time information and control systems.
Direction 1. Analysis and optimization of functioning in different time scales of multi-level control systems with incomplete information
The complexity of many modern control systems often does not allow obtaining in advance a complete description of the processes occurring within the system and its interaction with the environment. As a rule, real systems are described by nonlinear dynamics equations, and quite often mathematical models of control systems take into account only the permissible ranges of changes in the parameters and characteristics of individual elements without specifying these parameters and characteristics themselves.
In addition, in some systems, in particular micromechanical and quantum, the use of classical methods of description in continuous or discrete time is complicated by the fact that the emerging internal and/or external interaction forces, as well as control actions, are fleeting, impulsive in nature and cannot be accurately calculated . The system seems to operate on different time scales: real (slow) and fast (pulse). Such temporal diversity is an internal property of many modern control systems, including systems with multi-level control, in which the upper levels use qualitative and discrete models, and the lower levels often use quantitative models with continuous time.
For this reason, the development of methods for mathematical formalization of the description of the functioning of such systems in hybrid (continuous-discrete) time, the study of their properties for controllability and stability under conditions of incomplete information, counteraction and non-standard restrictions on controls and phase variables is an urgent task. An equally pressing task is the development of methods for synthesizing optimal control of such continuous-discrete systems, both deterministic and stochastic.
In addition, in conditions of uncertainty and lack of a priori information, the tasks of optimizing the process of collecting and processing information (observation management and optimal filtering) are very relevant.
Direction 2. Management and optimization in multi-level and decentralized systems of organizational and technical nature
2.1. Management and optimization in network-centric systems
Modern complex organizational and technical systems are characterized by high dimensions, decentralization, multi-level management, the need for effective planning of activities taking into account training, multi-criteria decisions and reflection of managed subjects.
Problems of planning and control of discrete and continuous distributed multi-connected systems of large dimension are also characterized by the multi-scale processes not only in time, but also by the distribution and multi-scale nature of space and represent one of the most complex and labor-intensive classes of optimization problems. For this reason, it is advisable to develop research methods and approaches to finding exact and approximate solutions, as well as simulation tools for use in decision support systems for planning, designing and managing complex technical, organizational (including transport and logistics) and information systems.
To manage group interaction of components of decentralized organizational and technical systems (network-centric systems, production systems, computing, telecommunications and other networks, etc.) under conditions of restrictions on communication channels and the complexity of calculations, the characteristics of information processing processes, as well as restrictions on decision-making time, computing capabilities and communication channel capacity. Therefore, it is relevant to develop methods for optimizing (taking into account the listed limitations) the structure of complex organizational and technical systems, including with simultaneous consideration of many criteria: detail of initial data, efficiency of information collection, planning and reflexive decision-making, limited productivity of individual computers, reduction of duplication of work , as well as the share of auxiliary calculations associated with servicing data transmission.
Multi-level and decentralized systems are characterized by distributed decision-making in real time in conditions of information counteraction, as well as incomplete and heterogeneous information, often of a multi-criteria qualitative and subjective nature. For this reason, it is necessary to develop methods for creating adequate information support systems and supporting strategic and operational decision-making in conditions of incomplete information and counteraction. For this purpose, it is advisable, in particular, to develop: multi-agent models of dynamic organizational and technical systems, including network models with conflicting agents, models of group behavior and its forecast, assessment of the balance of interests and the formation of coalitions in these systems, as well as the development of information technologies and means of presenting information about the external environment and the knowledge of intelligent agents.
2.2. Intelligent control of moving objects
Quantitative models cannot always be created to solve the assigned problems; therefore, along with traditional methods, the Program uses artificial intelligence methods. Artificial intelligence, as a field of knowledge, has undergone a huge leap over the past fifty years, both in the development and clarification of the very concept of intelligence, and in the field of practical application of artificial intelligence in various fields of human activity: in technology, economics, business, medicine, education, etc. Many theoretical concepts and methods of artificial intelligence have been transformed into applied intelligent technologies based on knowledge.
The peculiarity of the modern generation of intelligent systems is that they are based on a complex model of the external environment, which takes into account both quantitative information and qualitative models - knowledge about the possible behavior of various environmental objects and their relationships with each other. The use of such models became possible thanks to the development of methods for representing knowledge, methods for integrating data from different sources, and a significant increase in the speed and memory capacity of computers.
The presence of a model of the external environment allows modern intelligent systems for controlling moving objects to make decisions in conditions of multi-criteria, uncertainty and risk, and the quality of these decisions can exceed the quality of decisions made by a person under conditions of information overload, limited time and stress.
In this regard, an urgent task is to develop new means and methods for the development of intelligent control of moving objects in the presence of the factors listed above.
2.3. Modeling and optimization of multi-level real-time information and control systems
The relevance of research in this direction is due to the need to develop methods for the analysis and synthesis of multi-level open modular real-time information and control systems (ICS RV) of multi-mode and multi-purpose objects operating under conditions of uncertainty, structural disturbances and emergency situations (ESS). Among these control objects are critical objects and systems of responsible use that determine the security of the state.
It is obvious that the problems and tasks of creating systems of this class can be successfully solved on the basis of the development of a unified theory and applied program-oriented methods of dynamic and scenario analysis and synthesis of the structure of such systems, their algorithmic, software and information support, and mechanisms for developing effective management actions. These, first of all, include the development of a formalized methodology for the design of open information management systems, including models and methods for synthesizing the optimal modular structure of object-oriented I&C RT with an open architecture according to various efficiency criteria. Based on the results obtained at the stage of dynamic analysis, the optimal functional modular structure of data processing and control is synthesized, i.e., the optimal composition and number of modules of the RT IMS are determined, the system interface is synthesized, and the structure of its software and information support for processing input streams of requests is determined.
To plan actions and support decision-making under conditions of uncertainty, structural disturbances and emergency situations, it is advisable to use methods of scenario analysis and synthesis of effective control actions in the ICS RV. In this case, a mathematical model of the propagation of structural disturbances and emergency situations will be formed in the language of weighted or functional signed graphs. Based on this model, rational scenarios for managing objects will be synthesized using the concepts of performance potential, durability and survivability of their constituent elements. Synthesis of scenarios for eliminating the causes and consequences of emergency situations in multi-mode target objects will be carried out taking into account dynamically determined time and resource constraints. It is also necessary to develop formulations and methods for solving inverse problems of survivability control of multi-mode and multi-purpose objects operating under conditions of uncertainty, structural disturbances and emergency situations.
The specificity of control systems and objects noted above, the scientific and practical significance of solving control, analysis and optimization problems for them allow us to formulate the following main goals and objectives of the Program.
1.2. Main goals and objectives
The main goal of the Program is to solve fundamental problems of control theory that hinder the implementation of promising projects of important national importance in the field of managing complex dynamic and intelligent systems with applications to controlling the movement of technical objects and processes in technological and organizational systems.
Research will be carried out on the following general topics.
Direction 1
· Development of methods for stabilizing nonlinear systems in situations of incomplete measurement of coordinates and restrictions on the permissible structure of control forces.
· Development of methods for robust and adaptive observation and control under deterministic, probabilistic and other models of uncertainty of parameters of the control object and operating environment.
· Development of methods and algorithms for qualitative and quantitative analysis of continuous, discrete and multi-level continuous-discrete dynamic models and control synthesis based on the reduction method with vector and matrix comparison functions and model transformations.
· Study of the problem of optimal control of a new class of mechanical systems moving in resistive media by changing the configuration or movement of internal bodies.
· Development of methods for mathematical formalization and solution of problems of impact interaction of mechanical systems in the presence of dry friction.
· Development of methods for optimal control of discrete-continuous and impulse dynamic systems.
· Development of methods for guaranteed control of nonlinear objects exposed to uncontrolled disturbances in the form of dynamic games.
· Development of the theory of control of quantum systems.
· Development of methods and algorithms for analyzing dynamic properties such as stability, invariance, dissipativity for assessing the state and synthesizing multi-level control of systems with a heterogeneous description of the dynamics of processes at different levels.
Direction 2.1
· Methods for solving control problems for large-scale network-centric systems with distributed parameters and multi-scale (in space and time) processes.
· Models and methods of communication-network decentralized intelligent management of distributed projects and programs.
· Methods for optimizing the structure of multi-level and decentralized systems.
· Methods and structures of computer implementation of network-centric control in a mathematically homogeneous space of distributed and parallel computing.
· Models and methods of group decision-making based on incomplete, heterogeneous, qualitative and subjective information.
· Models and methods for planning and managing complexes of interrelated operations in complex technical and transport and logistics systems.
· Development of principles, architecture, methods and algorithms for creating distributed software intelligent systems based on multi-agent technologies.
· Development of models and methods of information management in multi-agent network structures.
Direction2.2
· Development of generalized models of situational management, reflecting the features of inclusion of fuzzy, neural network and logical-dynamic elements in the structure of models.
· Development of a route planning method that ensures the property of communication stability of a group of controlled dynamic objects, heterogeneous (quantitative and qualitative) in their model representation.
· Development of methods for analysis and synthesis of adaptive real-time modeling platforms that take into account nonlinearity, multiconnectivity, and high dimensionality of control objects with application to marine moving objects.
· Optimization of intelligent systems for multi-level control of moving objects in a conflict environment, taking into account their group interaction, multi-criteria, uncertainty and risk.
· Development of methods for providing technical vision for intelligent control systems.
· Development of methods for intelligent control of dynamic objects performing complex maneuvering, based on the organization of forced movement in the state space of the system.
Direction2.3
· Models and methods for analyzing and optimizing the modular structure of object-oriented multi-level real-time information and control systems with an open architecture under conditions of uncertainty and structural disturbances.
· Methods for analyzing and optimizing the modes of electric power systems and their management.
· Models and methods of the scenario-indicator approach to searching for points of vulnerability for management tasks.
· Methods for modeling, analysis and optimization of multi-mode processes for controlling moving objects.
· Development of methods and algorithms for intelligent identification of nonlinear non-stationary objects to improve control efficiency by forming a technological knowledge base based on a priori information about the control object.
· Geoinformation technologies for modeling natural-technogenic complexes in problems of managing ecosystems of megacities.
· Analysis and optimization of information support for navigation and control systems.
· Models and methods of production process management.
The results of the developed theory and methods of analysis and synthesis of control systems will be used in the following areas:
· traffic control in aviation and astronautics, land and sea objects, vehicles;
· multi-agent network-centric systems, production systems, computing, telecommunications and other networks ;
· transport and logistics systems ;
· global energy, gas transportation and other large-scale infrastructure systems;
· information support systems for management tasks and support for making strategic and operational decisions in conditions of incomplete information and counteraction.
Fundamental problems of the theory of constructing control systems require their intensive development. Development of research in this direction will allow:
Development of the theoretical foundations for solving the complex triune problem of control-computation-communication (problem - " Control- Computation- Communication") for complex information and control systems, including in conditions of restrictions on communication channels and subsystem failures;
Solve problems of managing fundamentally new objects and processes related to moving objects, special-purpose objects, technological and organizational systems;
To create effective methods for functional diagnostics and ensuring fault tolerance of control systems of aircraft and other moving objects, as well as the dynamic stability of electric power systems;
Improve the quality, speed up and reduce the cost of developing design solutions through algorithmization and automation of the control system development process.
Hereinafter, control is understood in a broad sense, including communication network, group, distributed control (in English literature - control in networks, control over networks, distributed control, etc.)