Intelligentsete juhtimissüsteemide juhtimisobjekt. Mõisted: intelligentne süsteem (IntS), intelligentne juhtimissüsteem (IntSU). Vajadus intelligentse juhtimise järele
See artikkel on saadaval ka:
Rosenberg Igor Naumovitš
Arukas juhtimine// Kaasaegsed juhtimistehnoloogiad. ISSN 2226-9339
. —. Artikli number: 7608. Avaldamise kuupäev: 2017-04-10. Juurdepääsurežiim: https://site/article/7608/Sissejuhatus
Arukas juhtimine on semiootilise, kognitiivse ja teabehalduse üldistus. Intelligentses transpordijuhtimises eristatakse järgmisi valdkondi: intelligentsed transpordisüsteemid, intelligentne semiootiline juhtimine ja intelligentne kognitiivne juhtimine. Arukas semiootiline juhtimine on seotud erinevate loogikavormide, toodete süsteemi ja evolutsiooniliste algoritmidega. Intelligentset kognitiivset juhtimist peetakse inimese arvutijuhtimise sünteesiks, kasutades assotsiatiivseid kanaleid ja vaikivate teadmiste analüüsi. Arukat juhtimist peetakse vahendiks otsuste tegemiseks ebakindluse tingimustes. Arukat teabehaldust peetakse infotehnoloogia abil intelligentse juhtimise toetamiseks.
Vajadus intelligentse juhtimise järele
Ühiskonna arenedes ning objektide ja juhtimisülesannete keerukamaks muutudes muutusid ka juhtimistehnoloogiad. "Suurandmete" probleem on muutunud kõige teravamaks keerukate olukordade haldamisel. See loob teabebarjääri "organisatsiooni juhtimise" tehnoloogiatele. Kaasaegset juhtimist iseloomustab halvasti struktureeritud teabe kasv. See tingib ülemineku intelligentsele juhtimisele, mis omakorda toob kaasa vajaduse kasutada teadmusjuhtimise tehnoloogiaid. Aruka juhtimise aluseks on intelligentsed süsteemid ja intelligentsed tehnoloogiad. Arukas süsteem on tehniline või tarkvara-riistvaraline süsteem, mis on võimeline leidma loovaid lahendusi konkreetsesse ainevaldkonda kuuluvatele probleemidele, mille kohta salvestatakse teadmised sellise süsteemi mällu. Lihtsustatult sisaldab intelligentse süsteemi struktuur kolme põhiplokki – teadmistebaasi, lahendajat ja intelligentset liidest. Lahendaja on intelligentse süsteemi domineeriv komponent. Esimest järku loogikas on lahendaja mehhanism loogiliste avaldiste lahenduste saamiseks. Mitme agendiga süsteemides, mis liigitatakse tehisintellektiks, kasutatakse ka lahendaja mõistet. Agent on probleemide lahendaja, mis on tarkvaraüksus, mis on võimeline tegutsema seatud eesmärkide saavutamise huvides. Sümboolses modelleerimises on s-solver sõnumi spetsialiseerumise väärtus. Efimov E.I. oli üks esimesi Venemaal, kes selle kontseptsiooni kasutusele võttis. . See lühike nimekiri näitab lahendaja tähtsust intelligentsete süsteemide ja intelligentsete tehnoloogiate jaoks.
Arukas juhtimine rakendussemiootika raames
Semiootika uurib märkide olemust, tüüpe ja funktsioone, märgisüsteeme ja inimese märgitegevust, loomulike ja tehiskeelte märgiolemust eesmärgiga konstrueerida üldine märkide teooria. Semiootika vallas on “rakendussemiootika” suund, mille rajajaks on D.A. Pospelov.
Semiootikas on kaks märkide rakendusvaldkonda: tunnetus ja suhtlemine. See jagab semiootika kaheks osaks: teadmiste semiootika; semantilise suhtluse semiootika. Aruka juhtimise aluseks on semiootiline süsteem. Pospelovi järgi on semiootiline süsteem W järjestatud kaheksa hulka:
W=< T, R, A, P, τ, ρ, α, π>, (1)
Kus
T - põhisümbolite komplekt;
R - süntaktiliste reeglite kogum;
A – palju teadmisi ainevaldkonnast;
P on lahenduste tuletamise reeglite kogum (pragmaatilised reeglid);
τ — hulga T muutmise reeglid;
ρ — hulga R muutmise reeglid;
α on hulga A muutmise reeglid;
π — hulga P muutmise reeglid.
Esimesed kaks komplekti genereerivad süsteemi W keele ja τ Ja ρ selle muutmist läbi viia. Reeglid α muuta palju teadmisi ainevaldkonna kohta. Kui käsitleda teadmisi formaalse süsteemi aksioomidena (mille moodustavad W esimesed neli elementi), siis reeglid α , muudavad sisuliselt semiootilise süsteemi W keele põhisümbolite tõlgendust ja seega ka õigesti konstrueeritud valemeid.
Esimesed neli komplekti moodustavad formaalse süsteemi FS, moodustavad elemendid viiest kaheksani formaalse süsteemi muutmise reeglid. Seda tehes tagavad nad formaalse süsteemi kohandamise, “kohandades” selle nii, et lahendataks ülesandeid ja probleeme, mis süsteemi raames FS ei saa lahendada.
Seega võib semiootilist süsteemi (1) defineerida liitdünaamilise süsteemina: W=
Seetõttu võib semiootilisele süsteemile anda uue tõlgenduse. Komposiitdünaamiline süsteem: W=
Reeglid MFsi = (τ, ρ, α, π), formaalse süsteemi (juhtobjekti) oleku muutjaid ühendab sõltuvus, mis eksisteerib semiootilise kolmnurga elementides (Frege kolmnurk). See tähendab, et ühe neljast reeglist rakendamine põhjustab ülejäänud reeglite rakendamise.
Need sõltuvused on keerulised, nende analüütiline esitus puudub ja see on keeruline ning on tehisintellekti semiootiliste süsteemide uurimise objekt. Seetõttu on lihtsam kasutada teabepõhist lähenemist ja teabe modelleerimist.
Formaalsete juhtimissüsteemide laiendused dünaamiliste komponentide kujul MFsi pakkuda süsteemide avatuse omadusi. Need loovad võimaluse kohandada juhtimisobjekti juhtimismõjude ja muutuvate välistingimustega.
Eelkõige võimaldab see oluliselt laiendada otsustamise toetamise võimalusi esialgse info ebakindluse, ebatäielikkuse ja ebaühtluse tingimustes.
Ebakindluse tüübid intelligentse juhtimise rakendamisel
Traditsioonilised juhtimismeetodid, sealhulgas teatud tüüpi intelligentne juhtimine, põhinevad eeldusel, et objekti oleku- ja juhtimismudelid kirjeldavad täpselt selle käitumist. Sellel eeldusel põhinevad meetodid sisalduvad klassikalises kontrolliteoorias. Kasvavate mahtude, struktureerimata info kasvu ja väliskeskkonna mõju tingimustes on aga iseloomulikud kõrvalekalded sellest tingimusest.
Peaaegu iga mudel on reaalse objekti, selle oleku ja käitumise lihtsustatud kirjeldus. Lihtsustamise aste võib olla vastuvõetav või tekitada ebakindlust. Juhtobjekti käitumise dünaamikas võivad objekti mõned omadused selle töö käigus oluliselt muutuda. Kõik see tekitab ebakindlust erinevates mudelites objekti kirjeldamisel ja raskendab selle kontrollimist, sealhulgas intellektuaalset kontrolli. Juhtimisalgoritmi või kehtestatud juhtimisreeglite komplekti aluseks olevat tüüpilist juhtimismudelit nimetatakse nominaalseks.
Olulise ebakindluse tingimustes ei ole klassikalised kontrolliteooria meetodid rakendatavad või annavad ebarahuldavaid tulemusi. Nendel juhtudel on ebakindla mudeliga objektide jaoks vaja kasutada spetsiaalseid juhtimissüsteemide analüüsi ja sünteesi meetodeid. Esimene samm on määrata määramatuse tüüp ja väärtus.
Juhtimismudelites on peamised määramatused: parameetriline, funktsionaalne, struktuurne ja signaalimine.
Parameetriline määramatus tähendab, et mudeli konstantsed parameetrid on teadmata või ebatäpselt määratud. Näiteks punktiväärtuste asemel on intervallväärtused. Infomõõtmissüsteemidele üleminekul võib rääkida parameetrite infokindluse puudumisest. Seetõttu võivad parameetrite tegelikud väärtused paljudel juhtudel oluliselt erineda aktsepteeritud nimiväärtustest.
Signaali määramatus tähendab, et juhtimistoiminguid või infovoogusid juhtimissüsteemis mõjutavad häired, mis muudavad oluliselt nominaalsignaale. Selliseid signaale, mis kalduvad juhtprotsessi nominaalsest kõrvale, nimetatakse häireteks või häireteks. Erinevus seisneb selles, et häired on passiivsed ja muudab ainult signaali-müra suhet. Häire muudab signaali samade häiretega.
Kaasaegsed intelligentsed juhtimissüsteemid peavad tagama paljude seotud tehniliste objektide autonoomse töö. See annab alust rääkida intelligentsest juhtimissüsteemist (ICS). Arukas süsteem peab lahendama keerulisi probleeme, sh planeerimist, eesmärkide seadmist, prognoosimist jne. Lahenduste mitmekülgsuse, kohandamise ja täpsuse huvides on soovitatav kasutada mitmeotstarbelist intelligentset juhtimist.
Intelligentse juhtimissüsteemi mitmetasandiline arhitektuur koosneb kolmest tasandist: kontseptuaalne, informatsiooniline ja operatiivne (joonis 1). Seda arhitektuuri kasutades ehitatud süsteem juhib keerukate tehniliste objektide käitumist autonoomse ja kollektiivse suhtluse tingimustes. Kontseptuaalne tasand vastutab kõrgemate intellektuaalsete funktsioonide rakendamise eest
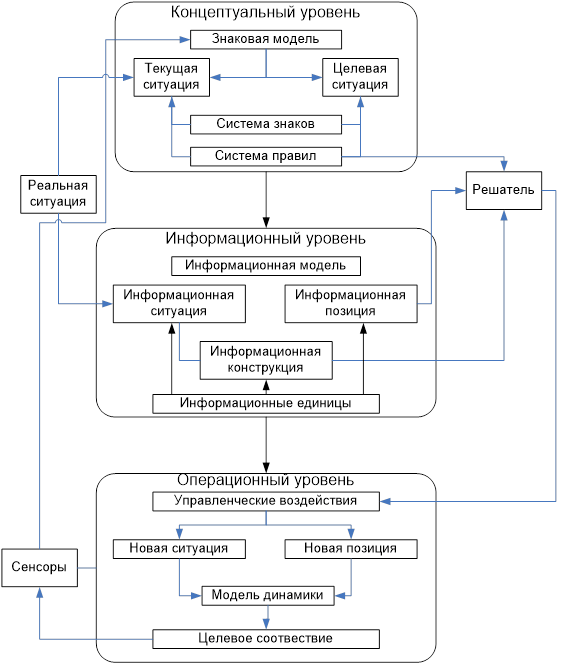
Joonis 1. Mitmetasandiline intelligentne juhtimine.
Kontseptuaalsel tasandil kasutatakse semiootilist (märgi)esitlust teadmistest ja vahetatakse sõnumeid teiste tasanditega. Teabe- ja tegevustasandid sisaldavad mooduleid, mis toetavad erinevaid intellektuaalseid ja teabeprotseduure ning muudavad need juhtimiseks.
Juhtimise põhiülesanne kontseptuaalsel tasandil on semiootilises (sümboolses) vormis esitatavate kontseptuaalsete teadmiste talletamine, omandamine ja kasutamine.
Komposiitdünaamiline süsteem: W=
Teadmiste omandamise aluseks on väliskeskkonna tegeliku olukorra mudel. Kõrgeimad intellektuaalsed funktsioonid hõlmavad põhieesmärgi ja alaeesmärkide seadmise, käitumise planeerimise ja mõjude jaotamise funktsioone üldises tegevuskavas.
Infohalduse tasandil lahendatakse info modelleerimise probleeme, millest peamised on: infosituatsiooni, infopositsiooni konstrueerimine, mis vastavad komponendile. FSI. Infohalduse tasandil lahendatakse infostruktuuri konstrueerimise ülesandeid, mis on kontseptuaalsel tasemel reeglisüsteemi peegeldus ja vastab komponendile. Mfsi. Infotasandi semiootilise kontrolli keeleline keskkond realiseerub erinevate infoühikute kasutamisega. Mis on aluseks infosituatsiooni, infopositsiooni ja infokujunduse konstrueerimisel.
Operatiivsel (täitevvõimu) tasandil viiakse ellu juhtimisotsuseid (juhtimise mõjutusi). Juhtimismõjud muudavad tingimata juhtobjekti infopositsiooni. Juhtimismõjud võivad vajadusel muuta juhtimisobjekti infoolukorda. Samas puudub enamasti vajadus infosituatsiooni muutmiseks. Selle taseme põhiülesanne on muuta juhtobjekti olekut ja asukohta ning teavitada muudatustest kontseptuaalsele tasemele.
Mitmetasandilisel arhitektuuril on mitmeid funktsioone. See hõlmab mitmeid inimese kognitiivseid funktsioone. See põhineb teabepõhise lähenemisviisi kasutamisel intelligentsel juhtimisel.
Märkimist väärib intellektuaalse ja infotehnoloogia erinevus. Infotehnoloogiad täidavad intelligentse juhtimise toetamise funktsioone. Peamine roll on intelligentsetel otsustustehnoloogiatel. Need võimaldavad koos otsusega või otsuse saamise protsessis otsida uusi teadmisi ja koguda intellektuaalseid ressursse. Infotehnoloogia loob ainult inforessursse. See tähendab, et selgesõnaliselt vormistatud teadmised võivad pärast omandamist muutuda kogemuse ja teadmistebaasi osaks ning neid kasutada probleemide lahendamiseks ja otsuste tegemiseks.
Järeldus
Arukas juhtimine on tõhus ja vajalik keerukate objektide haldamisel, mille jaoks on raske või võimatu leida formaalseid töömudeleid. Aruka juhtimise aluseks on esiteks semiootilised mudelid ja teiseks infomudelid. Arukad juhtimismeetodid on mitmekesised ja rakendatavad tehnilistes, kognitiivsetes ja transpordisüsteemides. Intelligentset juhtimist kasutatakse laialdaselt mitmeotstarbelises juhtimises. Kaasaegne intelligentne haldus integreeritakse pilveplatvormidesse ja -teenustesse. Hajutatud organisatsioonide ja korporatsioonide juhtimisel on vaja arvestada ruumiliste suhete ja ruumiliste teadmistega. Teine probleem on vaikivate teadmistega töötamiseks mõeldud intelligentsete tehnoloogiate piiratud arv. Tehniliselt on teadmusjuhtimise probleem seotud inforessursside muutmisega intellektuaalseteks ressurssideks ja nende rakendamisega intelligentsetes tehnoloogiates.
Bibliograafia
- Pospelov D.A. Rakendussemiootika ja tehisintellekt // Tarkvaratooted ja süsteemid. – 1996. – nr 3. – C.10-13
- Tsvetkov V.Ya. Kognitiivne kontroll. Monograafia - M.: MAKS Press, 2017. - 72 lk. ISBN 978-5-317-05434-2
- Tsvetkov V.Ya. Infohaldus. — LAP LAMBERT Academic Publishing GmbH & Co. KG, Saarbrücken, Saksamaa 2012 -201с
- Osipov G.S. Olukorra juhtimisest rakendussemiootikani. Tehisintellekti uudised. 2002, nr 6.
- Nikiforov V. O., Slita O. V., Ušakov A. V. Arukas juhtimine määramatuse tingimustes. - Peterburi: Peterburi Riiklik Ülikool ITMO, 2011.
- McAfee A., Brynjolfsson E. Suured andmed: juhtimise revolutsioon //Harvardi äriülevaade. – 2012. – Ei. 90. – lk 60-6, 68, 128.
- Tsvetkov V.Ya. Markelov V.M., Romanov I.A. Infobarjääride ületamine // Kaug- ja virtuaalõpe. 2012. nr 11. Lk 4-7.
- Forbes L. S., Kaiser G. W. Elupaiga valik merelindude sigimisel: millal ületada infobarjäär //Oikos. – 1994. – Lk 377-384.
- Tsvetkov V. Ya. Arukas juhtimistehnoloogia. // Russian Journal of Sociology, 2015, kd. (2), Is. 2.-р.97-104. DOI: 10.13187/rjs.2015.2.97 www.ejournal32.com.
- Zilouchian A., Jamhidi M. Intelligentsed juhtimissüsteemid, mis kasutavad pehmet arvutusmetoodikat. – CRC Press, Inc., 2000
- Alavi M., Leidner D. E. Ülevaade: Teadmusjuhtimine ja teadmusjuhtimise süsteemid: Kontseptuaalsed alused ja uurimisprobleemid //MIS kvartalis. – 2001. – lk.107-136.
- Pospelov D.A. Arutluskäikude modelleerimine. Vaimsete tegude analüüsimise kogemus. - M.: Raadio ja side, 1989. -184c.
- De Moura L., Bjørner N. Z3: Tõhus SMT-lahendaja //Süsteemide ehitamise ja analüüsi tööriistad ja algoritmid. – Springer Berlin Heidelberg, 2008. – lk 337-340.
- Rosenberg I.N., Tsvetkov V.Ya. Mitme agentuuriga süsteemide rakendamine intelligentsetes logistikasüsteemides. // International Journal of Experimental Education. – 2012. – nr 6. – lk.107-109
- Efimov E.I. Intellektuaalsete ülesannete lahendaja - M.: Nauka, Füüsikalise ja matemaatikakirjanduse peatoimetus, 1982. - 320 lk.
- Pospelov D.A., Osipov G.S. Rakendussemiootika // Tehisintellekti uudised. - 1999. - nr 1.
- Tsvetkov V.Ya. Infomääramatus ja kindlus infoteadustes // Infotehnoloogiad. - 2015. - nr 1. -lk 3-7
- Tsvetkov V. Ya. Infoolukordade dihhotoomne hindamine ja teabe paremus // Euroopa teadlane. Seeria A. 2014, kd (86), nr 11-1, lk 1901-1909. DOI: 10.13187/er.2014.86.1901
- Tsvetkov V. Ya. Infoolukord ja teabepositsioon juhtimisvahendina // Euroopa teadlane. Seeria A. 2012, kd (36), 12-1, lk 2166-2170
- Tsvetkov V. Ya. Infokonstruktsioonid // European Journal of Technology and Design. -2014, kd (5), nr 3. - lk 147-152
- 22. Pospelov D.A. Semiootilised mudelid: õnnestumised ja väljavaated // Küberneetika. – 1976. – nr 6. – Lk.114-123.
- 23. Pospelov D.A. Semiootilised mudelid juhtimises. Küberneetika. Praktilised asjad. - M.: Nauka, 1984. – Lk.70-87
- Osipov G.S. jt. Sõidukite intelligentne juhtimine: standardid, projektid, teostused // Aerospace instrumentation. – 2009. – Ei. 6. – lk 34-43.
- Snytyuk V. E., Yurchenko K. N. Teadmiste hindamise intelligentne juhtimine // VE Snytyuk, KN Yurchenko − Cherkassy. – 2013.
- Pugatšov I. N., Markelov G. Ya. Linnatranspordisüsteemide intelligentne juhtimine // Transport ja teenindus: kogumine. teaduslik teosed.–Kaliningrad: I. Kanti nimeline kirjastus. – 2014. – Ei. 2. – lk 58-66.
- Atiencia V., Diveev A.I. Aruka mitmeotstarbelise juhtimissüsteemi süntees // Teaduse ja hariduse kaasaegsed probleemid. – 2012. – Ei. 6.
- Gribova V.V. jt Pilveplatvorm intelligentsete süsteemide arendamiseks ja haldamiseks // Rahvusvaheline teadus- ja tehnikakonverents “Open semantical technologies for the design of intelligent systems” (OSTIS-2011).-Minsk: BSUIR. – 2011. – Lk 5-14.
TEEMA 13. INTELLIGENTSED JUHTMISÜSTEEMID
Uue põlvkonna süsteemid - intelligentsed süsteemid (IS) - on toonud ellu teised süsteemikomponentide korraldamise põhimõtted, on ilmunud uued mõisted, terminid ja plokid, mida varem arendustes ja seega ka teaduskirjanduses ei kohatud.
Intelligentsed süsteemid on võimelised sünteesima eesmärki, tegema otsust tegutseda, pakkuma tegevust eesmärgi saavutamiseks, ennustama tegevuse tulemuse parameetrite väärtusi ja võrdlema neid tegelikega, moodustama tagasisidet, kohandama eesmärki või kontroll
Joonisel 13.1 on kujutatud IS-i plokkskeem, kus on välja toodud kaks süsteemi suurt plokki: eesmärgi süntees ja selle rakendamine.
Esimeses plokis sünteesitakse sensorsüsteemist saadud info aktiivse hindamise põhjal motivatsiooni ja teadmiste olemasolul eesmärk ning otsustatakse tegutseda. Teabe aktiivne hindamine toimub käivitussignaalide mõjul. Keskkonna ja süsteemi enda oleku muutlikkus võib kaasa tuua vajaduse millegi järele (motivatsiooni) ning teadmiste olemasolul saab sünteesida eesmärgi.
Eesmärki mõistetakse kui ideaalset, mõttelist ootust tegevuse tulemusele. Jätkates eesmärgi saavutamise võimaluste võrdlemisel aktiivselt keskkonna ja süsteemi enda oleku, sh juhtimisobjekti info hindamist, saate teha otsuse tegutseda.
Lisaks teostab teises plokis dünaamiline ekspertsüsteem (DES), lähtudes hetketeabest keskkonna ja oma IS-i oleku kohta, eesmärgi ja teadmiste olemasolul eksperthinnangu, langetab juhtimisotsuse. , ennustab tegevuse tulemusi ja arendab juhtimist.
Kodeeritud kujul esitatud juhtseade teisendatakse füüsiliseks signaaliks ja saadetakse täiturmehhanismidele.
Juhtobjekt, saades täiturmehhanismidelt signaali, teostab ühe või teise toimingu, mille tulemused parameetrite kujul edastatakse tagasisideahela 2 kaudu diiselelektrijaama, kus neid võrreldakse prognoositutega. . Samas saab vastavalt eesmärgi omadustele tõlgendatud ja I plokki siseneva tegevuse tulemuse parameetreid kasutada saavutatud tulemuse emotsionaalseks hindamiseks: näiteks eesmärk on saavutatud, kuid tulemus ei meeldi.
Kui eesmärk on igati saavutatud, tugevdatakse juhtimist. Vastasel juhul toimub kontrolli korrigeerimine. Kui eesmärk on saavutamatu, korrigeeritakse eesmärki.
Tuleb märkida, et äkiliste muutustega keskkonnaseisundis või juhtimisobjektis või süsteemis tervikuna on võimalik sünteesida uus eesmärk ja korraldada selle saavutamine.
IS-i struktuur sisaldab koos uute elementidega traditsioonilisi elemente ja seoseid, selles on kesksel kohal dünaamiline ekspertsüsteem.
Plokk 1 - eesmärgi süntees Plokk II - eesmärgi elluviimine
Joonis 13.1 – IC plokkskeem
Formaalselt kirjeldatakse IS-i järgmise kuue väljendiga:
T X S M T ;
T M S ST ;
C T S R T;
T X= (A T)X T+(B T)U T;
T Y = (D T)X T;
T R Y KOOS T ,
kus T on ajahetkede hulk;
X, S, M, C, R ja Y - süsteemi, keskkonna, motivatsiooni, eesmärgi, prognoositava ja tegeliku tulemuse olekute komplektid;
A, B ja D - parameetrimaatriksid;
Arukad teisendusoperaatorid, kes kasutavad teadmisi.
See kirjeldus ühendab süsteemiobjektide esitusi väärtuste komplekti, avalduste komplekti või mõne muu vormi kujul.
IS-i dünaamilisi omadusi saab kirjeldada olekuruumis. Intellektuaalsed operaatorid, kes rakendavad tunnetusprotsessis taju, esitust, mõistete kujundamist, hinnanguid ja järeldusi, on formaalne vahend teabe ja teadmiste töötlemiseks ning otsuste tegemiseks. Kõik need aspektid peaksid olema reaalajas ja reaalses maailmas toimiva DES-i ehitamise aluseks.
Dünaamiline ekspertsüsteem on kompleksne üksus, mis on võimeline hindama süsteemi ja keskkonna seisundit, võrdlema tegevuse soovitud ja tegelike tulemuste parameetreid, langetama otsuseid ja arendama eesmärgi saavutamisele kaasa aitavat juhtimist. Selleks peab DES omama teadmisi ja meetodeid probleemide lahendamiseks. Ekspertsüsteemi ülekantavad teadmised võib jagada kolme kategooriasse:
1) kontseptuaalne (mõistete tasandil) teadmine on teadmine, mis kehastub inimkõne sõnades või täpsemalt teaduslikus ja tehnilises mõttes ning loomulikult nende mõistete taga olevates keskkonnaobjektide klassides ja omadustes. Siia kuuluvad ka seosed, seosed ja sõltuvused mõistete ja nende omaduste vahel, abstraktsed seosed, mis väljenduvad ka sõnades ja terminites. Kontseptuaalsed teadmised on peamiselt fundamentaalteaduste valdkond, arvestades, et mõiste on aine kõrgeima produkti – aju – kõrgeim toode;
2) faktilised, ainelised teadmised on teabe kogum konkreetsete objektide kvalitatiivsete ja kvantitatiivsete omaduste kohta. Just selle teadmiste kategooriaga seostatakse mõisteid "teave" ja "andmed", kuigi nende mõistete kasutamine vähendab mõnevõrra nende tähendust. Kõik teadmised kannavad teavet ja neid saab esitada andmete kujul; faktiteadmised on see, millega arvutusmasinad on alati tegelenud ja millega nad tegelevad siiani kõige rohkem. Andmete kogumise tänapäevast vormi nimetatakse tavaliselt andmebaasideks. Loomulikult tuleb andmebaaside korrastamiseks ja nendest vajaliku info otsimiseks toetuda kontseptuaalsetele teadmistele;
3) algoritmilised, protseduurilised teadmised - seda nimetatakse tavaliselt sõnadeks "oskus", "tehnoloogia" jne. Arvutustehnikas rakendatakse algoritmilisi teadmisi algoritmide, programmide ja alamprogrammide kujul, kuid mitte kõiki neid, vaid neid. mida saab käest käest üle kanda ja kasutada ilma autorite osaluseta. Sellist algoritmiliste teadmiste rakendamist nimetatakse tarkvaratooteks. Tarkvaratoodete kõige levinumad vormid on rakendustarkvarapaketid, tarkvarasüsteemid ja muud, mis on keskendunud DES-i konkreetsele rakendusvaldkonnale. Rakendustarkvarapakettide organiseerimine ja kasutamine põhineb kontseptuaalsetel teadmistel.
On selge, et kontseptuaalsed teadmised on teadmiste kõrgem, määrav kategooria, kuigi praktilisest vaatenurgast võivad teised kategooriad tunduda olulisemad.
Ilmselt seetõttu kehastatakse kontseptuaalseid teadmisi harva arvutiga töödeldaval kujul. Ja kui see on kehastatud, on see enamasti puudulik ja ühekülgne. Enamasti jääb kontseptuaalse teadmise kandjaks inimene. See aeglustab paljude protsesside automatiseerimist.
Kontseptuaalsete teadmiste esitusi või täpsemalt süsteeme, mis rakendavad kõiki kolme teadmiste kategooriat, kuid toovad kontseptuaalsed teadmised esiplaanile ja töötavad selle intensiivse kasutamise alusel, nimetatakse teadmusbaasideks.
Infosüsteemides teadmistebaaside loomine ja laialdane kasutamine on üks pakilisemaid ülesandeid. Teadmistebaasi kontseptuaalset osa nimetame domeenimudeliks, algoritmilist osa tarkvarasüsteemiks ja faktilist osa andmebaasiks.
DES-i järgmine funktsioon on probleemide lahendamine. Probleemi saab masin lahendada ainult siis, kui see on formaalselt püstitatud – kui sellele on kirjutatud formaalne spetsifikatsioon. Viimased peavad tuginema mingile teadmistebaasile. Domeenimudel kirjeldab üldist keskkonda, milles ülesanne tekkis, ja spetsifikatsioon kirjeldab ülesande sisu. Kokkuvõttes võimaldavad need tuvastada, milliseid abstraktseid seoseid ja sõltuvusi, millistes kombinatsioonides ja millises järjestuses probleemi lahendamiseks kasutada.
Rakendusprogrammid pakuvad nende sõltuvuste taga spetsiifilisi tööriistu ja sisaldavad ka saadud võrrandite lahendamise algoritme. Lõpuks annab andmebaas nende algoritmide täitmiseks kõik või osa sisendandmed; puuduvad andmed peavad sisalduma spetsifikatsioonis.
Need kolm teadmistebaasi osa vastavad probleemi lahendamise kolmele etapile:
1) abstraktse lahendusprogrammi koostamine (sh probleemi esilekerkimine, sõnastamine ja täpsustamine);
2) ülesande tõlkimine sobivasse masinkeelde;
3) saate edastamine ja teostamine.
Abstraktse programmi konstrueerimine on seotud kontseptuaalsete teadmiste esitamise ja töötlemisega IS-is ning on definitsiooni järgi tehisintellekti omand.
Tehisintellekt on seotud tekstide, suuliste teadete töötlemisega loomulikus keeles, teabe analüüsi ja töötlemisega (igat tüüpi kujutiste äratundmine, teoreemide tõestamine, loogiline järeldamine jne).
DES-i funktsioonideks on ka probleemi lahendamise tulemuste hindamine, tegevuse tulevase tulemuse parameetrite kujundamine, juhtimisotsuste tegemine, juhtimise arendamine ning soovitud ja tegelike tulemuste parameetrite võrdlemine. See hõlmab protsesside modelleerimist, et hinnata probleemi lahendamise võimalikke tagajärgi ja õigsust.
Pange tähele, et tegelikel juhtudel on probleem uuritavate objektide kirjeldamisel. Sellist kirjeldust ei peeta õigustatult ülesande spetsifikatsiooni osaks, kuna reeglina esitatakse ühe objekti kohta palju ülesandeid, mida tuleb teadmusbaasi moodustamisel loomulikult arvestada. Lisaks võib selguda, et tekkinud probleemi ei saa täiesti automaatselt lahendada näiteks objekti spetsifikatsiooni või kirjelduse puudulikkuse tõttu.
Seetõttu on IS-is teatud etappidel soovitatav kasutada DES-iga töötamiseks interaktiivset režiimi. Peame meeles pidama, et domeenimudel kirjeldab üldist olukorda (teadmisi), spetsifikatsioon aga ülesande sisu. Väga olulised probleemid on ühtse tarkvarakeskkonna loomine ja algoritmide süntees otseselt probleemipüstitusest lähtuvalt.
Olenevalt eesmärgist, millega IS seisab, võivad teadmusbaasil, probleemi lahendamise, otsuse tegemise ja kontrolli arendamise algoritmidel olla loomulikult erinev esitus, mis omakorda sõltub probleemide lahendamise olemusest. Sellest lähtuvalt võib näha kolme tüüpi DES-i. Esimest tüüpi DES-i struktuur on näidatud joonisel 13.2.

Joonis 13.2 – Esimest tüüpi DES-i struktuur
Siin eeldatakse, et kontseptuaalsed ja faktilised teadmised kajastavad täpselt teatud ainevaldkonnaga seotud protsesse ja teavet.
Seejärel leitakse selles valdkonnas tekkiva probleemi lahendus rangete matemaatiliste meetodite alusel, vastavalt sõnastusele ja spetsifikatsioonile. Otsusuuringu ja prognoosi tulemusi kasutatakse eksperthinnangu saamiseks ja juhtimise vajaduse kohta otsuse tegemiseks. Seejärel genereeritakse teadmistebaasis oleva sobiva juhtimisalgoritmi alusel juhtimistoiming.
Selle mõju tõhusust ja järjepidevust hinnatakse enne kontrollobjekti jõudmist matemaatilise simulatsioonimudeli abil. Hindamine peab toimuma kiiremini kui tegelikud protsessid IS-is.
Otsustamist rakendavad DES on aga keerukad tarkvarasüsteemid, mis on loodud automaatseks otsustamiseks või otsustajate abistamiseks ning keeruliste süsteemide ja protsesside operatiivjuhtimisel töötavad need reeglina rangete ajapiirangute all.
Erinevalt esimest tüüpi DES-st, mis on loodud optimaalse lahenduse leidmiseks ning põhineb rangetel matemaatilistel meetoditel ja optimeerimismudelitel, on teist tüüpi DES-id peamiselt keskendunud raskesti formaliseeritavate probleemide lahendamisele täieliku ja usaldusväärse teabe puudumisel (joonis 13.3). . Siin kasutatakse ekspertmudeleid, mis on üles ehitatud ekspertide - antud probleemvaldkonna spetsialistide teadmistele ja heuristilistele meetoditele lahenduse leidmiseks.
Üheks peamiseks probleemiks teist tüüpi DES-i kujundamisel on otsustusprotsesside kirjeldamiseks formaalse aparaadi valik ja selle alusel probleemkohale adekvaatse (semantiliselt korrektse) otsustusmudeli ehitamine. Sellise seadmena kasutatakse tavaliselt tootmissüsteeme. Põhiline uurimistöö toimub aga tootmissüsteemi algoritmilise (deterministliku) tõlgenduse kontekstis koos sellele omase lahenduse leidmise järjestikuse skeemiga.
Saadud mudelid on sageli ebaadekvaatsed tegelikele probleempiirkondadele, mida iseloomustab ebamäärasus lahenduse leidmise protsessis. Väljapääs sellest olukorrast on paralleelsus otsingus.
Tegelikkuses tuleks keskenduda esimest ja teist tüüpi DES-i ühendamisele kolmandat tüüpi arvutus-loogiliseks DES-iks, kus teadmistebaas ühendab rangete matemaatiliste valemite vormis kirjelduse ekspertteabega ja vastavalt ka matemaatilise. mitterangete heuristiliste meetoditega lahenduse leidmise meetodid, ühe või teise komponendi kaalu määrab ainevaldkonna adekvaatse kirjeldamise võimalus ja lahenduse leidmise meetod (joon. 13.4).

Joonis 13.3 – Teise taseme diiselelektrijaama ehitus
DES-i väljatöötamisel tekivad järgmised probleemid:
1. teadmistebaasi koosseisu ja selle kujunemise määramine;
2. infosüsteemide infoprotsesside kirjeldamiseks uute väljatöötamine ning tuntud teooriate ja meetodite kasutamine;
3. teadmiste esitamise ja kasutamise korraldamise viiside arendamine;
4. paralleelsusega algoritmide ja tarkvara arendamine ning paindliku loogika kasutamine;
- sobivate arvutuskeskkondade leidmine paralleelalgoritmide realiseerimiseks DES-i moodustamisel.

Joonis 13.4 – Kolmanda taseme diiselelektrijaama ehitus
Lisaks eelnevale on oluline märkida, et DES peab olema võimeline kohanema dünaamilise probleemvaldkonnaga, suutma tuua olukordade kirjeldusse uusi elemente ja seoseid, muuta objektide toimimise reegleid ja strateegiaid. otsuste tegemise ja juhtimise arendamise protsess, töö puuduliku, ebaselge ja vastuolulise teabega jne.
Dünaamilised ekspertsüsteemid toimivad osana IS-dest, millel on tagasiside, mistõttu on oluline tagada selliste IS-de stabiilne töö.
Traditsioonilisest vaatenurgast võib eeldada, et diiselelektrijaama reaktsiooni kestus sisendmõjudele, s.o. sisendteabe töötlemiseks ja juhttoimingu väljatöötamiseks kuluv aeg on puhas viivitus. Sagedusanalüüsi põhjal on võimalik hinnata süsteemi faasiomaduste muutust ja seeläbi määrata stabiilsusvaru. Vajadusel saate süsteemi parandada filtrite abil.
Klassikalise juhtimisteooria seisukohalt on IS-d aga mitme objektiga, mitmega seotud süsteemid, mille stabiilsuse analüüs tavameetodite abil on väga keeruline.
Praegu on robustse kontrolli teooria (-control theory, -control) üks intensiivselt arenevaid juhtimisteooria harusid. Suhteliselt noorena (esimesed tööd ilmusid 80ndate alguses) tekkis see mitmesuguste häirete ja parameetrite muutuste tingimustes töötavate mitmemõõtmeliste lineaarsete juhtimissüsteemide sünteesimise pakiliste praktiliste probleemide tõttu.
Ebakindluse tingimustes töötava reaalse keeruka objekti juhtimise kavandamise probleemile saate läheneda erinevalt: ärge proovige kasutada üht tüüpi juhtimist - adaptiivset või robustset. Ilmselgelt tuleks valida tüüp, mis vastab keskkonna ja süsteemi seisundile, mis määratakse süsteemi käsutuses oleva teabe põhjal. Kui süsteemi töötamise ajal on võimalik korraldada info vastuvõtmist, on soovitav seda kasutada juhtimisprotsessis.
Kuid kuni viimase ajani tekkis sellise kombineeritud juhtimise rakendamisel kontrolli tüübi valimise algoritmi määramisel ületamatuid raskusi. Tehisintellekti probleemide arendamisel saavutatud edusammud võimaldavad sellise algoritmi sünteesida.
Tõepoolest, püstitagem ülesanne: kujundada süsteem, mis kasutab adaptiivset ja robustset juhtimist ning valib tehisintellekti meetoditel põhineva juhtimise tüübi. Selleks kaalume mõlema tüübi omadusi ja, võttes arvesse nende spetsiifilisi omadusi, määrame kindlaks, kuidas kombineeritud juhtimissüsteemi ehitada.
Üks peamisi mõisteid robustse kontrolli teoorias on määramatuse mõiste. Objekti määramatus peegeldab objekti mudeli ebatäpsust, nii parameetrilist kui ka struktuurset.
Vaatleme üksikasjalikumalt mõõtemääramatuse täpsustamise vorme robustses juhtimisteoorias lihtsa süsteemi abil - ühe sisendi ja ühe väljundiga (joonis 13.5).
Signaalidel on järgmine tõlgendus: r - põhisisendsignaal; u - objekti sisendsignaal (sisend); d - väline häire; y on mõõdetava objekti väljundsignaal (väljund).

Joonis 13.5 – Ühe sisendi ja ühe väljundiga süsteem
Juhtimise teoorias on määramatus mugavalt määratletud sageduspiirkonnas. Oletame, et normaalse objekti ülekandefunktsioon on P ja vaatleme häiritud objekti, mille ülekandefunktsioon on
|
|
kus W on fikseeritud ülekandefunktsioon (kaalufunktsioon);
– suvaline stabiilne ülekandefunktsioon, mis rahuldab ebavõrdsust.
Nimetame sellist häiret lubatavaks. Allpool on mõned määramatuse mudelite valikud.
| (1+W)P; P+W; P/(1+WP); P/(1+W). |
Koguste ja W kohta tuleb igal juhul teha vastavad eeldused.
Sisendsignaalide määramatus d peegeldab objektile ja kontrollerile mõjuvate väliste häirete erinevat olemust. Määramatut objekti võib seega käsitleda objektide kogumina.
Valime tagasisidesüsteemidele mingi kindla tunnuse, näiteks stabiilsuse. Kontroller C on selle omaduse suhtes vastupidav, kui see on mõnel määramatusega määratletud objektide hulgast.
Seega tähendab robustsuse mõiste regulaatori olemasolu, objektide kogumit ja süsteemi teatud tunnuse fikseerimist.
Käesolevas töös me ei puuduta kogu kontrolliteooria raames lahendatud probleemide kogumit. Puudutagem ainult minimaalse tundlikkuse probleemi: konstrueerides kontrolleri C, mis stabiliseerib suletud süsteemi ja minimeerib väliste häirete mõju väljundile y, teisisõnu minimeerib välishäiretelt väljundisse y edastatavate funktsioonide maatriksi normi. .
Selle ja tegelikult kogu robustsete juhtimisprobleemide lahendamise üks omadusi on asjaolu, et eelnevalt, kontrolleri kujundamise protsessis, kehtestame piirangud sisendmõjudele ja objekti vormis esinevale määramatusele. ebavõrdsusest.
Tugeva süsteemi töötamise ajal ei kasutata kontrollimiseks teavet süsteemi ebamäärasuste kohta.
Loomulikult viib see selleni, et robustsed süsteemid on konservatiivsed ja siirdeprotsesside kvaliteet ei rahulda mõnikord nende süsteemide arendajaid.
Nagu robustne adaptiivne juhtimissüsteem, on see loodud objektide jaoks, mille kohta või mõjude kohta pole süsteemi töö alguses teavet. Kõige sagedamini saavutatakse kohanemisomadus objekti või sisendmõju matemaatilise mudeli otsese või kaudse moodustamise kaudu.
See eristab nii otsimise adaptiivset juhtimist, mis põhineb juhtimiskvaliteedi indikaatori ekstreemumi otsimisel ja säilitamisel, kui ka mitteotsingut, mis põhineb kontrollitud koordinaatide tegelike muutuste kõrvalekalde kompenseerimisel soovitud muutustest, mis vastavad kvaliteedinäitaja nõutav tase. Järgmisena reguleeritakse vastavalt täiustatud mudelile adaptiivset kontrollerit.
Seega on adaptiivsete juhtimissüsteemide põhiomaduseks võime hankida töö käigus teavet ja kasutada seda infot juhtimiseks.
Lisaks kasutavad adaptiivsed süsteemid alati a priori teavet süsteemi ebakindluse kohta. See on põhimõtteline erinevus adaptiivse ja robustse lähenemisviisi vahel.
Vaatleme lihtsaimat adaptiivset juhtimissüsteemi, mis tagab sisendsignaali jälgimise objekti sisendis oleva müra korral (joonis 13.6).

Joonistamine. 13.6 – Adaptiivne juhtimissüsteem
Formaalne erinevus joonisel 13.5 olevast vooluringist on kohandusplokk A, mis lähtuvalt objekti väljundsignaalist ja antud kvaliteeti iseloomustavast signaalist genereerib signaali adaptiivse kontrolleri koefitsientide reguleerimiseks.
Pidades silmas iga regulaatori puudusi, on soovitatav proovida kasutada nende eeliseid, pakkudes välja kombineeritud skeemi objekti juhtimiseks. Adaptiivne süsteem, kasutades kohanemisplokki, genereerib teatud teavet väliskeskkonna seisundi kohta. Eelkõige on vaadeldaval juhul võimalik saada teavet välise häiringu kohta d. Juhtimisalgoritm C a vastab väliskeskkonna hetkeseisule, vastavalt kohandamisplokis sätestatud kriteeriumile. Kuid adaptiivne süsteem nõuab, et sisendsignaalil r oleks üsna lai sagedusvahemik, ning seab välise häiresignaali d väärtusele ja sagedusspektrile ranged piirangud. Seetõttu saavad adaptiivsed süsteemid töötada ainult sisendsignaali r ja väliste häirete d kitsastes vahemikes. Väljaspool neid vahemikke on adaptiivsel süsteemil halb juhtimiskvaliteet ja see võib isegi kaotada stabiilsuse.
Eelpool käsitletud robustse ja adaptiivse juhtimise omadused viivad järeldusele, et süsteemi töötamise ajal on mõnel juhul kasulik kasutada robustset juhtimist, teistel - adaptiivset, s.t. oskama kombineerida juhtimist olenevalt väliskeskkonna seisundist.
Kombineeritud juhtimine. Kombineeritud juhtimissüsteemide projekteerimisel on põhiküsimuseks see, kuidas, milliste teadmiste (info) alusel valida üht või teist tüüpi juhtimist.
Suurimad võimalused selleks annavad tehisintellekti meetodid. Nende eelis lihtsate lülitusalgoritmide ees on suure hulga andmete ja teadmiste kasutamine juhtimistüübi valimise algoritmi moodustamiseks.
Kui ühendame formaalselt joonistel 13.5, 13.6 näidatud ahelad, saame kombineeritud juhtimisahela (joonis 13.7).
Nagu jooniselt näha, peab juhtsignaal lülituma robustselt kontrollerilt adaptiivsele ja vastupidi – keskkonna muutudes süsteemi töö käigus. Kasutades intelligentsete süsteemide teooria meetodeid, on võimalik tagada üleminek ühelt juhtimistüübilt teisele olenevalt süsteemi töötingimustest.
|
|

Joonis 13.6 – Kombineeritud juhtimisskeem
Mõelgem esmalt, millist teavet saab kasutada süsteemi intelligentse üksuse käitamiseks. Nagu teada, on ühe sisendi ja ühe väljundiga süsteemid sageduspiirkonnas hästi kirjeldatud. Seetõttu on loomulik kasutada juhtimistüübi valikul otsustusprotsessi korraldamiseks sageduskarakteristikuid.
Nagu eespool mainitud, vastab tugeva juhtimisega süsteemi sagedusreaktsioon määramatuse piirkonna parameetrite halvimale kombinatsioonile. Seetõttu võib robustset juhtimist võtta valitud juhtimise ühe piirina.
Teise piiri määravad uuritava süsteemi võimalused (sõidukiirus, toide jne). Nende kahe piiri vahel on ala, kus on mõttekas kasutada adaptiivset juhtimist.
|
|

Joonis 13.7 – Kombineeritud juhtimisskeem
Kuna adaptiivne algoritm on tundlik süsteemi töö algfaasi suhtes, on selles etapis soovitatav kasutada tugevat juhtimist, mis on väliste häirete muutumise kiiruse suhtes üsna tundetu. Kuid selle puuduseks on siirdeprotsesside pikk kestus ja väljundkoordinaadi suured lubatud väärtused häirete mõjul.
Mõne aja pärast on mõttekas lülituda tugevalt juhtimiselt adaptiivsele juhtimisele.
Adaptiivne juhtimine võimaldab häireinfo olemasolul sisendsignaali täpsemalt jälgida. Adaptiivne juhtimine nõuab sisendsignaali spektri rikkust ja näiteks aeglaselt muutuvate signaalide korral võivad kohanemisprotsessid ebaõnnestuda või oluliselt aeglustada. Sellises olukorras on vaja uuesti üle minna robustsele juhtimisele, mis tagab süsteemi stabiilsuse.
Eeltoodust järeldub, et süsteemi toimimiseks on vaja teavet kasuliku häiresignaali sagedusspektri ja signaali-müra suhte kohta.
Lisaks on vaja eelteavet sagedusspektri kohta, millel adaptiivne süsteem töötab, ja juhtobjekti konkreetsete omaduste kohta määramatuse piirkonna piiridel. Selle teabe põhjal saate luua andmebaasi, kuhu sisestatakse eelnevalt iga objektiklassi spetsiifiline teave. Teave kasuliku signaali sagedusspektri, häirete ja signaali-müra suhte kohta siseneb süsteemi töö käigus andmebaasi ja seda uuendatakse pidevalt.
Andmebaasi sisu saab kasutada teadmistebaasis, mis moodustatakse reeglite kujul. Sõltuvalt süsteemi spetsiifilistest omadustest saate seadistada kahe juhtimistüübi vahelisi lülitusi. Nõutavad reeglid moodustatakse ühes vaadeldavale juhtumile sobivas loogilises süsteemis.
Andmebaaside ja teadmiste olemasolul on võimalik välja töötada otsustusmehhanism, mis tagab juhtimistüübi õige valiku sõltuvalt süsteemi töötingimustest.
|
|

Joonis 13.8 – intelligentse seadmega (IB) süsteemi plokkskeem
Süsteemi intelligentne osa töötab diskreetselt, kindlate ajavahemike järel. Joonisel 13.8 on kujutatud intelligentse infoturbeüksusega süsteemi plokkskeem, mis võimaldab valida juhtimistüübi.
Ploki sisendis võetakse vastu signaal r ja objekti y mõõdetud, väljundsignaal. Info eeltöötluse plokis BPOI, lähtudes signaalide ajakarakteristikutest r(t), y(t), sisendsignaali sageduskarakteristikutest r(w) ja välisest häiringust d(w) spektrite r(w) ja d(w) asukoht ning iseloomulikud signaali-müra suhte väärtused r(w)/d(w). Kogu see teave läheb andmebaasi. BPR-i otsustusplokk, kasutades genereeritud teadmistebaasi ja andmebaasi andmeid, töötab välja otsuse, mille kohaselt aktiveeritakse üks juhtimistüüpidest. Järgmisel intervallil korratakse protsessi uute andmetega.
UDC 004.896
I. A. Štšerbatov
ROBOOTISÜSTEEMIDE INtelligentne JUHTIMINE Ebakindluse tingimustes
Sissejuhatus
Arukas juhtimine on tehisintellekti meetodite kasutamine erineva füüsilise olemusega objektide juhtimiseks. Robootikasüsteemide juhtimise vallas kasutatakse kõige enam tehisintellekti meetodeid. Selle põhjuseks on ennekõike robotite autonoomia ja vajadus lahendada mitteametlikke loomingulisi probleeme puuduliku teabe ja erinevat tüüpi ebakindluse tingimustes.
Kuni viimase ajani jäi see ülesannete klass loomuliku intelligentsuse eesõiguseks: juhtobjekti operaator, insener, teadlane, st inimene. Kaasaegsed edusammud automaatjuhtimise teooria vallas, intelligentsed meetodid poolstruktureeritud ülesannete vormistamiseks ja keerukate tehniliste süsteemide juhtimiseks võimaldavad rakendada väga keerulisi robotsüsteeme, mis hõlmavad mobiilseid robotplatvorme, paindlikke automatiseeritud liine ja android-roboteid.
Robotsüsteemid töötavad ebatäieliku sisendteabe tingimustes, kui paljude parameetrite mõõtmise põhimõtteline võimatus seab juhtimisprogrammile olulisi piiranguid. See toob kaasa vajaduse töötada välja algoritmide baas, mis võimaldab arvutada kaudsete märkide ja mõõdetavate näitajate põhjal mõõtmata parameetreid.
Väliskeskkonna ebakindlus, milles robotsüsteem töötab, sunnib juhtimissüsteemi hõlmama erinevat tüüpi kompensaatoreid, mooduleid teabe kohandamiseks, kogumiseks ja järjestamiseks.
Probleemi sõnastamine
Uurimistöö eesmärk oli välja töötada robotsüsteemide intelligentsete juhtimissüsteemide ehitamise käsitlused, mis on tööspetsiifilisuse suhtes muutumatud, võttes arvesse sisendinfo ebatäielikkust ja erinevat tüüpi määramatust.
Selle eesmärgi saavutamiseks on vaja lahendada mitmeid omavahel seotud probleeme: analüüsida robotsüsteemide intelligentsete juhtimissüsteemide arhitektuure; töötada välja üldistatud algoritm robotsüsteemi situatsiooniliseks tuvastamiseks; töötada välja robotsüsteemi juhtimissüsteemi üldistatud skeem; töötada välja intelligentsed juhtimissüsteemid käsitsemisroboti, mobiilse robotplatvormi ja paindliku automatiseeritud liini jaoks.
Uurimismeetodid
Uurimistöö käigus kasutati automaatjuhtimise üldteooria, häguste hulkade teooriat, närvivõrke, süsteemianalüüsi ja eksperthinnangute teooriat.
Robotsüsteemi asukoht väliskeskkonnas
Arukate juhtimisalgoritmide rakendamiseks on esmaseks ülesandeks robotsüsteemi asukoha hetkeolukorra tuvastamine. Selle probleemi lahendamiseks on välja töötatud olukorra tuvastamise süsteemi plokkskeem (joonis 1).
Tehnilise nägemise ja sensoorse tajumise seade on mõeldud väliskeskkonna seisundi muutuste kindlakstegemiseks ja keskkonna sensoorse kaardi esitamiseks edasiseks töötlemiseks. Keskkonna sensoorne kaart on pilt olukorrast, milles robot praegusel ajahetkel asub. Sensoorse kaardi koostamise ajavahemik valitakse lähtuvalt ainevaldkonna spetsiifikast.
Teadmistepagas
Operaator
Intellektuaalne
liides
Identifikaator
algoritmid
Tehnilise nägemise ja sensoorse aistingu organid
Väliskeskkond
Executive
mehhanismid
Riis. 1. Olukorra tuvastamise süsteemi plokkskeem
Töömälu on analoogselt ekspertsüsteemidega ette nähtud anduritelt tuleva teabe töötlemiseks, mida töödeldakse robotsüsteemi olemasoleva algoritmide andmebaasi ja teadmistebaasi (KB) abil.
Algoritmide baas sisaldab algoritme sensori kaardi eeltöötlemiseks (digitaalne signaalitöötlus, helimustrite ja kujutiste tuvastamine), mõõtmata parameetrite arvutamiseks (funktsionaalsed sõltuvused mõõdetud parameetritest), teabe täielikkuse taastamiseks (teadmiste täielikkuse ja ebaühtluse kontrollimiseks, andmete kohandamiseks). mittestatsionaarsust ja muutuvaid välistingimusi arvestavad teadmised), matemaatilised tehted jne.
Teadmistebaas on keerukas hierarhiline struktuur, mis sisaldab a priori teavet väliskeskkonna kohta, mis on sätestatud koolituse etapis, täielikke ja järjepidevaid teadmisi, mille robot on omandanud toimimise ja väliskeskkonna tajumise protsessis. Teadmiste baasis olevad teadmised järjestatakse vastavalt asjakohasuse kriteeriumidele ja ajakohastatakse, võttes arvesse roboti toimimise spetsiifikat, teadmiste kohandamise algoritmide alusel.
Kõige olulisem plokk on olukorra identifikaator. Just see plokk vastutab sensoorse kaardi põhjal olukorra pildi õige äratundmise eest. Selle ploki saadud teave on otsustav robotsüsteemi juhtimisprogrammi valimisel.
Ja lõpuks intelligentne liides, mis on vajalik operaatoriga suhtlemiseks. Operaator jälgib robotsüsteemi toimimist, samuti jälgib protsessi püstitatud eesmärkide saavutamiseks. Reeglina peaks roboti ja operaatori vaheline suhtlus toimuma loomuliku keele liidest kasutades piiratud loomuliku keele alamhulga.
Robotsüsteemi juhtimissüsteemi struktuur määramatuse tingimustes
Algoritmide ja programmide rakendamine robotsüsteemide intelligentseks juhtimiseks ebakindluse tingimustes on seotud mitmete oluliste raskustega.
Sisendinfo eeltöötluse algoritmide keerukus ja robotsüsteemi enda käitumismudeli struktuurne ebakindlus määravad intelligentse juhtimissüsteemi struktuuri liiasuse.
Roboti juhtimise probleemi lahendamiseks määramatuse tingimustes töötati välja järgmine intelligentse juhtimissüsteemi arhitektuur (joonis 2).
Olukorra tuvastamise süsteem (SIS) peaks olema osa igast robotsüsteemi intelligentsest juhtimissüsteemist. Intelligentne juhtimisseade (ICD) sisaldab juhtseadet ja juhtimisprogrammi valimise moodulit (CPSU). Selle ploki eesmärk on välja töötada roboti mehaanilisele süsteemile (MS) mõjuva elektriajamite süsteemi (ED) juhtimistoiming.
Riis. 2. Robotsüsteemi intelligentse juhtimissüsteemi plokkskeem
Tööstuslike manipulaatorite juhtimissüsteemid
Tööstuslike manipulaatorite traditsioonilised juhtimissüsteemid jagunevad mitmeks klassiks. Esimene süsteemide klass on programmijuhtimissüsteemid.
Manipulaatori töökeha pideva juhtimise süsteem hõlmab manipulaatori joondamist võrdlusmudeliga. Selles juhtimisalgoritmis ei võeta arvesse manipulaatori MS kadusid ja eeldatakse, et kõik ajamite poolt tekitatud jõud kanduvad üle tööelemendile.
Töötavas kehas olevat programmeeritavat jõu juhtimissüsteemi kasutatakse mitte ainult jõuvektori, vaid ka töökeha asendivektori juhtimiseks. Erineva liikuvusastmega manipulaatori töökeha liikumise ja jõu sõltumatu juhtimise süsteemil on kaks tagasisidega juhtimisahelt: asendi ja jõu abil.
Manipulaatori töökeha liikumise ja jõu sidusjuhtimise süsteemis reguleeritakse töökeha asendivektori ülesannet vastavalt jõuvektori hetkeväärtusele. See tähendab, et kui töötav keha liigub, reguleeritakse selle löögi suurust vastavalt väliskeskkonnale avaldatavale mõjujõule.
Adaptiivseid juhtimissüsteeme kasutatakse järgmiste toimingute tegemisel: suvaliselt paikneva või liikuva objekti ülesvõtmine, muutuva asendiga õmbluste kaarkeevitus, liikuvate ja ootamatute takistuste vältimine. Selleks kasutatakse assotsiatiivse mäluga adaptiivseid süsteeme.
Tööstuslike manipulaatorite juhtimiseks kasutatakse ka tugevaid juhtimissüsteeme, mis on praegu laialdaselt kasutusel.
Aruka juhtimise rakendamine
Robotsüsteemi toimimise probleem ebakindluse tingimustes on mitmetahuline.
Vaatleme robotsüsteemi käitumise planeerimise probleemi ebakindluse tingimustes. Selle probleemi lahendamiseks on kõige sobivam kasutada dünaamiliste ekspertsüsteemide tehnoloogiat. Sellise ekspertsüsteemi teadmistebaasi kohandatakse aja jooksul. Kui kasutatakse tootmisreeglite baasi, siis kontrollitakse pidevalt tootmisreeglite koostist terviklikkuse ja järjepidevuse osas. Lisaks uuendatakse ja asendatakse kohanemisalgoritmide tõttu aegunud ja aegunud reegleid. Samas pööratakse erilist tähelepanu õpetajata ekspertsüsteemi koolitamise (isekoolituse) küsimustele, mis on tingitud asjaolust, et süsteemi jälgimine kõrgelt kvalifitseeritud spetsialisti poolt ei ole majanduslikult otstarbekas.
Ekspertsüsteemi teadmistebaasi iseõppiv või isehäälestuv plokk nõuab hoolikat uurimist robotsüsteemi intelligentse juhtimissüsteemi projekteerimisetapis.
minu. Probleemi lahendamise tõhusus sõltub sageli selle projekteerimistöö etapi teostamise kvaliteedist. See peaks sisaldama alamsüsteeme teadmiste täielikkuse ja ebaühtluse hindamiseks, juhtimise kvaliteedi hindamiseks ja teadmiste korrigeerimiseks.
Kronoloogiliselt võib järgmine etapp pärast käitumise planeerimist olla loomulikus keeles robotsüsteemile juhtimiskäskude andmise probleem. Loomuliku keeleliidese loomiseks on meie arvates kõige sobivam rakendusvahend häguste hulkade teooria.
Kindlat, eelnevalt kirjeldatud terminikomplekti sisaldavate keeleliste muutujate abil koostatakse ainevaldkonna kirjeldus, piiratud käskude ja objektide süsteem, mis mõjutavad robotsüsteemi ja muutuvad selle mõjul. Antud juhul kasutatavad fasifitseerimise ja defasifitseerimise meetodid ning hägusad loogilised järelduste algoritmid mõjutavad oluliselt juhtimistoimingute täpsust ja robotsüsteemi töökiirust.
Ja lõpuks, närvivõrgu juhtimissüsteemide kasutamine robotsüsteemide jaoks. Närvivõrgu peamine eelis on see, et pole vaja teada ega luua objekti matemaatilist mudelit, kuna närvivõrk on universaalne hägusaproksimaator.
Objekt (robootiline süsteem) toimib kui “musta kast”. Närvivõrk võib toimida juhitava robotsüsteemi võrdlusmudelina. Tuleb märkida, et see peab olema õppiv mitmekihiline närvivõrk (objekti identifikaator). Neuraalvõrgu mudel kohandatakse juhtimisobjektile, lähtudes objekti ja mudeli väljundsignaalide mittevastavusest. See moodustab ka koolitusnäidise juhtseadme reguleerimiseks ja reguleerimiseks vastavalt valitud kvaliteedikriteeriumile.
Järeldus
Analüüs võimaldas sünteesida robotsüsteemide intelligentse juhtimissüsteemi arhitektuuri, mis on tööspetsiifika suhtes muutumatu. Väljatöötatud olukorra tuvastamise algoritm võimaldab koostada väga informatiivseid väliskeskkonna sensoorseid kaarte. Kirjeldatakse peamisi lähenemisviise robotsüsteemide intelligentsete juhtimissüsteemide moodustamiseks. Näidatakse juhtseadmete rakendamiseks kasutatavate kõige tõhusamate tehisintellekti meetodite edasiarendamise suunad.
BIBLIOGRAAFIA
1. Jurevitš E. I. Robootika alused. - Peterburi: BHV-Peterburg, 2007. - 416 lk.
2. Robotite manipuleerimissüsteemid / toim. A. I. Korendyaseva. - M.: Masinaehitus, 1989. - 472 lk.
3. Burdakov S. F. Elastsete elementidega robustsete regulaatorite süntees: artiklite kogumik. teaduslik tr. - Nr 443. Mehaanika ja juhtimisprotsessid. - Peterburi: Peterburi Riiklik Tehnikaülikool, 1992.
4. Protalinsky O. M. Tehisintellekti meetodite rakendamine tehnoloogiliste protsesside automatiseerimisel: monograafia. - Astrahan: kirjastus ASTU, 2004. - 184 lk.
Artikkel saabus toimetusse 13. jaanuaril 2010
ROBOOTIKASÜSTEEMIDE INTELLEKTUAALNE JUHTIMINE Ebakindluse tingimustes
I. A. Štšerbatov
Antud töö eesmärgiks on robootikasüsteemide intellektuaalsete juhtimissüsteemide ehitamise käsitluste kujundamine, mis on funktsioneerimise spetsiifilisuse suhtes invariantsed, arvestades sissepääsuinfo ebatäielikkust ja erinevat liiki ebakindlust. Teostatakse analüüs, mis võimaldas sünteesida robootikasüsteemide intellektuaalse juhtimissüsteemi arhitektuuri, mis on funktsioneerimise spetsiifikast muutumatu. Välja töötatud olukorra tuvastamise algoritm võimaldab luua häid keskkonna puutekaarte. Kirjeldatakse robootikasüsteemide intellektuaalsete juhtimissüsteemide moodustamise põhilisi lähenemisviise. Näidatud on täiturseadmete rakendamisel rakendatava tehisintellekti kõige tõhusamate meetodite perspektiivi arendamise suunad.
Võtmesõnad: robootikasüsteem, robot, intellektuaalne juhtimine, struktuurne määramatus, info mittetäielikkus, puutekaart, närvivõrk, ebaselgete hulkade teooria, isekoolitatud ekspertsüsteem.
Mõisted: intelligentne süsteem (IntS), intelligentne juhtimissüsteem (IntSU)
Mõistet “intelligentne süsteem” tõlgendavad erinevad uurijad erinevalt. Vaatleme peamisi, sealhulgas kaasnevaid selgitusi.
Arukas süsteem on intelligentse toega info- ja arvutussüsteem probleemide lahendamiseks ilma operaatori (otsustaja – otsustaja) osaluseta. Arukas süsteem on intelligentse toega info- ja arvutussüsteem probleemide lahendamiseks operaatori – otsustaja osalusel. Juhtsüsteemide loomisel saab tõhusalt kasutada põhilisi intelligentseid tehnoloogiaid, sealhulgas tehisnärvivõrke (ANN), geneetilisi algoritme, hägusloogikat. Samal ajal määrab nende kasutamise otstarbekuse hajutatud arvutusskeemide rakendamise võimalus, mis võimaldab laiendada otsinguruumi ilma vajalike arvutuste keerukust märkimisväärselt suurendamata; oskus kirjeldada juhtimisprotsesse "lihtsa" ja loomuliku keelega; mittelineaarsete juhtimisobjektide mitteanalüütilise esituse võimalus ja protsesside kirjeldamine, mida iseloomustab ebaselgus ja suur hulk eriolukordi; võime kiiresti otsida ruumist lahendusi halvasti vormistatud probleemidele.
Intelligentsed süsteemid Need on teadmistepõhised süsteemid. Arvutis töödeldes transformeeruvad teadmised sarnaselt andmetega: 1) Teadmised inimese mälus mõtlemise tulemusena. 2) Materiaalsed teadmiste kandjad (õpikud, õppevahendid). 3) Teadmisvaldkond - ainevaldkonna põhiobjektide, nende atribuutide ja neid ühendavate mustrite tingimuslik kirjeldus. 4) Teadmiste kujutamine mis tahes mudeli (produktsiooni, semantilise, raami või muu) alusel. Tootmismudel või reeglipõhine mudel võimaldab teadmisi esitada lausete kujul nagu "Kui , See" Semantiline võrk on suunatud graaf, mille tipud on mõisted ja kaared on nendevahelised seosed. Raam on andmestruktuur mõne kontseptuaalse objekti esitamiseks. 5) Teadmistebaas arvuti salvestusmeediumitest. Tootmismudeli kasutamisel koosneb teadmistebaas reeglistikust. Programmi, mis juhib reeglite loetlemist, nimetatakse järeldusmootoriks (arutlusmootor, järeldusmootor, deduktiivne mootor, interpretaator, reeglite tõlgendaja, lahendaja). Väljundmasin töötab tsükliliselt. Igas tsüklis vaadeldakse töömälust (andmebaasist) olemasolevaid fakte ja teadmistebaasi reegleid ning seejärel võrreldakse neid. Valitud reeglite kogum moodustab nn konfliktikomplekti (st konkreetses olukorras saab korraga rakendada mitut reeglit). Konflikti lahendamiseks on järeldusmootoril kriteerium, mille järgi ta valib ühe reegli, mille järel see käivitatakse. See väljendub reegli järeldust moodustavate faktide (soovitatud toimingute) sisestamises töömällu või vastuoluliste reeglite valimise kriteeriumi muutmises. Kui reegli järeldus sisaldab toimingu nime, siis see käivitatakse. Järeldusmootor põhineb modus ponens põhimõttel, mida tõlgendatakse järgmiselt: "Kui väide A on teadaolevalt tõene ja on olemas reegel kujul "kui A, siis B", siis väide B on tõene.
Under intelligentsed süsteemid mõista mis tahes bioloogilist, kunstlikku või formaalset süsteemi, millel on võime osaleda eesmärgipärases käitumises. Viimase alla kuuluvad suhtlemise, teadmiste kogumise, otsustamise, õppimise, kohanemise omadused (ilmingud). Tehisintellekti uurimine põhineb teadmistepõhisel lähenemisel. Teadmistele tuginemine on tehisintellekti põhiparadigma. Töös on teadmiste tõlgendused ühendatud nelja rühma (ehk tasandisse): psühholoogiline, intellektuaalne, vormilis-loogiline ja infotehnoloogiline. Teadmiste psühholoogiline tõlgendamine - mentaalsed kujundid, mentaalsed mudelid. Teadmiste intellektuaalne tõlgendamine on teabe kogum teatud ainevaldkonna kohta, sealhulgas faktid antud ainevaldkonna objektide, nende objektide omaduste ja neid ühendavate seoste kohta, antud ainevaldkonnas toimuvate protsesside kirjeldused, samuti teave tüüpiliste probleemide lahendamise viiside kohta. Formaal-loogiline tõlgendus on formaliseeritud teave teatud ainevaldkonna kohta, mida kasutatakse selle ainevaldkonna kohta uute teadmiste saamiseks (järeldamiseks) spetsiaalsete protseduuride abil. Infotehnoloogiline tõlgendus - arvutimällu salvestatud struktuurne teave, mida kasutatakse intelligentsete programmide töös.
Töödes D.A. Pospelov ja tema kolleegid kirjeldasid järgmist teadmiste kontseptuaalsed omadused: sisemine tõlgendatavus, mõistetakse iga teabeühikut identifitseerivate kordumatute nimede olemasoluna; struktuur, mis määrab üksikute infoüksuste rekursiivse üksteisesse pesastumise võimaluse; väline ühenduvus, funktsionaalsete, juhuslike ja muud tüüpi suhete loomise võimaluse määratlemine teabeüksuste vahel; skaleeritavus, iseloomustada erinevate mõõdikute kasutuselevõtu võimalust teabeühikute kvantitatiivsete, järguliste ja muude seoste registreerimiseks; tegevust, mis peegeldab võimet algatada teatud asjakohaseid toiminguid uue teabe ilmumisel.
Arukas infosüsteem(või teadmistepõhine süsteem) põhineb teadmusbaasi kasutamise kontseptsioonil, et luua võimalusi erinevate klasside rakendusprobleemide lahendamiseks, sõltuvalt kasutajate konkreetsetest teabevajadustest. Selliste süsteemide ehitamise põhieesmärk on välja selgitada, uurida ja rakendada kõrgelt kvalifitseeritud ekspertide teadmisi praktikas tekkivate keeruliste probleemide lahendamiseks. Teadmistepõhiste süsteemide ehitamisel kasutatakse ekspertide kogutud teadmisi konkreetsete reeglite kujul teatud probleemide lahendamiseks. Selle suuna eesmärk on jäljendada inimlikku kunsti analüüsida struktureerimata ja poolstruktureeritud probleeme.
Intelligentsete süsteemide rakendusteoorias (IntS) käsitletakse juhtimissüsteemi ainult tihedas interaktsioonis seda ümbritseva välismaailmaga ning intelligentset süsteemi tõlgendatakse kui aktiivsete subjektide ja neile vastandlike objektide (subjektide) kogumit, mis on genereeritud kas subjekti aktiivse eksisteerimise situatsiooniline võimalus või mõne süsteemse või süsteemivälise subjekti sihtülesanne ja kõik intellektuaalse süsteemi moodustavad mis tahes laadi elemendid on neile ühise välismaailma mõju all. .
Töös A.V. Timofejev ja R.M. Jusupov ütles, et IntSU sisaldab tehisintellekti elemente, mis võimaldavad kujundada kontseptsioone ja koguda teadmisi, planeerida käitumist ja teha otsuseid ebakindlates tingimustes, ära tunda kujutisi ja kujundada keskkonnamudelit. Luureelementide kasutuselevõtt automaatjuhtimissüsteemides (ACS) laiendab oluliselt nende funktsionaalsust võrreldes adaptiivsete iseliikuvate relvadega. Intellektualiseerimise tulemusena omandavad iseliikuvad relvad võime lahendada teatud tüüpi intellektuaalseid ülesandeid, mis tavaliselt inimestele määrati. Seetõttu kasutatakse IntSU-sid üha enam juhtudel, kui olukord ei võimalda (ei õigusta) inimoperaatori otsest osalemist juhtimisprotsessis või kui on vaja vähendada operaatori töömahukust, kui juhtimisobjekt töötab tavarežiimidel. .
Automaatjuhtimissüsteemide intellektualiseerimise vajadus tekib tavaliselt juhtudel, kui juhtimisobjektid on keerulised (näiteks ebalineaarse dünaamikaga objektid, mis töötavad määramatuse tingimustes) ning nende kirjeldamist ja koostoimet keskkonnaga on raske struktureerida ja formaliseerida. Kirjelduse ebatäielikkus avaldub nii objekti ja keskkonna mudeli aprioorses määramatuses kui ka juhtimiseesmärkide ebakindluses ja mitmekesisuses. Sageli on selliste objektide käitumise kirjeldus ebamäärane ja sisaldab kvalitatiivset teavet (eksperthinnangud, usutavad järeldused, liikmelisuse funktsioonid). Juhtimisprobleemide lahendamine sellistes tingimustes on võimatu ilma tehisintellekti meetodeid kasutamata, see tähendab ilma iseliikuvate juhtimissüsteemide intellektualiseerimiseta.
Seega taandub automaatjuhtimissüsteemide intellektualiseerimine keskkonna, objekti ja juhtimissüsteemi puudutavate teadmiste esitamisele ja töötlemisele, kasutades selleks vajalikke õppimis- ja kohanemisvahendeid. Need teadmised ja tööriistad võimaldavad viimistleda juhtimisobjekti ja keskkonna mudelit ning anda ACS-ile põhimõtteliselt uued omadused, mis sarnanevad inimoperaatori või eksperdi intellektuaalsete võimetega. IntSU iseloomulikeks joonteks on oskus õppida ja ise õppida teadmiste kujundamise kaudu, sünteesida ja tuvastada käitumismustreid, ära tunda ja analüüsida olukordi, iseorganiseerumine ja kohanemine seoses erinevate teguritega. Need võimed võimaldavad kompenseerida erinevaid sisemise ja välise ebakindluse tegureid, mis tekivad ACS-i töö käigus, ning seeläbi parandada või optimeerida juhtimise kvaliteeti.
Järgnevalt nimetame IntSU-ks sellist süsteemi, kus teadmised juhtimisobjekti ja keskkonna tundmatutest omadustest moodustuvad õppimise ja kohanemise protsessis ning saadud teavet kasutatakse automaatsete juhtimisotsuste tegemise protsessis, et kontrolli kvaliteet paraneb. Pange tähele, et õppimis- ja kohanemisprotsessid võivad toimuda kas juhtimisprotsessist isoleerituna (näiteks koolitusrežiimis koos õpetajaga, mida tavaliselt mängib operaator või ekspert) või otse reaalajas automaatse juhtimise protsessis. .
Vaatleme intelligentsete juhtimissüsteemide klassi tüüpiliste esindajate funktsionaalse struktuuri tunnuseid, tõlgendades neid seoses tehnoloogiliste juhtimisobjektidega (üksused, masinad, masinakompleksid).
OEMMP RAS-i alusuuringute programm nr 14
“MITMETASEMISTE, INTELLIGENTSETE JA VÕRGUSÜSTEEMIDE TÖÖ ANALÜÜS JA OPTIMISEERIMINE EBAKINNITUSTE TINGIMUSED”
1. Programmi põhjendus
1.1. Teaduslik ja praktiline tähtsus
Tehnoloogia intensiivne areng (võrkude loomine, arvutite miniaturiseerimine, nende kiiruse suurendamine jne) seab kaasaegsetele juhtimissüsteemidele uusi nõudmisi ja avab uusi võimalusi nii sisseehitatud juhtimissüsteemide (suurte dispetšerkeskuste tasemel) kui ka juhtimissüsteemide tasandil. võrgutasand (side).võrk, rühm) detsentraliseeritud mitme agentuuri süsteemide interaktsioon. Juhtimissüsteemid omandavad üha enam infohaldussüsteemide iseloomu ning neid uuritakse juhtimis-, andmetöötlus- ja kommunikatsiooniteooriate ristumiskohas. Seega on sidekanalite omadustega arvestamine vajalik näiteks detsentraliseeritud (mitmeagendiliste) süsteemides ning sisseehitatud arvuti omadused on olulised mitmetasandilistes juhtimissüsteemides selliste intelligentsete funktsioonide nagu tehniline nägemine rakendamisel. , tegevuste planeerimine, koolitus, mitme kriteeriumi alusel otsuste tegemine, refleksioon jne. Eelkõige on juhtimise intellektualiseerimise eesmärk suurendada süsteemide toimimise autonoomiat, kui puuduvad kvantitatiivsed dünaamika mudelid või häired toimimises. kontrolliobjekti, põhjustades kvantitatiivsete mudelite (näiteks keeruka süsteemi arengut kirjeldavate võrrandite) adekvaatsuse kaotuse, tugevdavad kvalitatiivsete mudelite (nn teadmised, näiteks loogilis-lingvistilised) mudelite rolli. juhtimissüsteemi ülemistel tasanditel kasutatavast objektist ja keskkonnast.
Programmi eesmärk on lahendada põhiprobleeme, mis tekivad Venemaa Föderatsiooni prioriteetsetes teaduse, tehnoloogia ja tehnika valdkondades. Ülesandeks on seatud uute fundamentaalsete ja rakenduslike tulemuste saamine keeruliste tehniliste, inimene-masin jt süsteemide juhtimisteooria vallas, võttes arvesse esialgse info ebakindlust ja puudumist, sh: stohhastiliste süsteemide analüüsi ja sünteesi teooriat. , liikumisjuhtimissüsteemide ja tehnoloogiliste protsesside loomise teooria koos jooksva diagnostika ja tehnilise seisukorra monitooringuga, samuti kaasaegsetel infotehnoloogiatel põhinevate automatiseeritud projekteerimissüsteemide ja intelligentse juhtimise loomise teooria.
Tulenevalt juhtimisteooria, analüüsi ja optimeerimise kasutamise mitmekesisusest erinevates rakendustes (transport, logistika, tootmine, lennundus- ja kosmosesüsteemid, allveelaevad ja pealveelaevad jne) on vaja arvestada suure hulga keerukuse teguritega. , nagu näiteks:
· mitmetasandiline juhtimine,
· detsentraliseerimine,
· mittelineaarsus,
· paljusus,
· parameetrite jaotus,
· protsesside erinev ulatus ruumis ja ajas,
· kõrged mõõtmed,
· alamsüsteemide kirjelduse heterogeensus,
· mitme režiimiga,
· impulssmõjude olemasolu,
· koordinaat-parameetriliste, struktuursete, regulaarsete ja ainsuse häirete olemasolu,
· deterministlike ja tõenäosuslike mudelite kasutamine süsteemi olekuvektori ja parameetrite, mõõtmisvigade omaduste ja väliskeskkonna kohta teabe määramatuse kirjeldamiseks;
viivitusefektide olemasolu juhtseadmel või objektil,
· kaasaegsete juhtimissüsteemide üldine struktuurne keerukus.
Seatud eesmärgi saavutamiseks ja põhiülesannete lahendamiseks hõlmab programm teadus- ja arendustegevust järgmistes põhivaldkondades:
1. Mittetäieliku informatsiooniga mitmetasandiliste juhtimissüsteemide toimimise analüüs ja optimeerimine erinevates ajaskaalates.
2. Juhtimine ja optimeerimine organisatsioonilise ja tehnilise iseloomuga mitmetasandilistes ja detsentraliseeritud süsteemides.
2.1. Haldamine ja optimeerimine võrgukesksetes süsteemides.
2.2. Intelligentne liikuvate objektide juhtimine.
2.3. Mitmetasandiliste reaalajas info- ja juhtimissüsteemide modelleerimine ja optimeerimine.
1. suund. Sisse toimimise analüüs ja optimeerimine mittetäieliku teabega mitmetasandiliste juhtimissüsteemide erinevad ajaskaalad
Paljude kaasaegsete juhtimissüsteemide keerukus ei võimalda sageli eelnevalt saada täielikku kirjeldust süsteemis toimuvatest protsessidest ja selle koostoimest keskkonnaga. Reeglina kirjeldatakse reaalseid süsteeme mittelineaarsete dünaamika võrranditega ja üsna sageli võtavad juhtimissüsteemide matemaatilised mudelid arvesse ainult üksikute elementide parameetrite ja omaduste lubatud muutuste vahemikke, neid parameetreid ja omadusi ise täpsustamata.
Lisaks muudab mõnes süsteemis, eriti mikromehaanilises ja kvantsüsteemis, klassikaliste kirjeldamismeetodite kasutamise pidevas või diskreetses ajas keeruliseks asjaolu, et esilekerkivad sisemised ja/või välised vastasmõjujõud, aga ka juhtimistoimingud on põgusad, olemuselt impulsiivne ja seda ei saa täpselt arvutada . Tundub, et süsteem töötab erinevatel ajaskaaladel: tegelik (aeglane) ja kiire (impulss). Selline ajaline mitmekesisus on paljude kaasaegsete juhtimissüsteemide, sealhulgas mitmetasandilise juhtimisega süsteemide sisemine omadus, kus ülemised tasemed kasutavad kvalitatiivseid ja diskreetseid mudeleid ning madalamad tasemed kasutavad sageli pideva ajaga kvantitatiivseid mudeleid.
Sel põhjusel on selliste süsteemide hübriid- (pidev-diskreetses) ajas toimimise kirjelduse matemaatilise vormistamise meetodite väljatöötamine, nende juhitavuse ja stabiilsuse omaduste uurimine mittetäieliku teabe, vastutegevuse ja mittestandardsete piirangute tingimustes. juhtseadiste ja faasimuutujate osas on kiireloomuline ülesanne. Sama pakiline ülesanne on selliste pideva-diskreetsete süsteemide, nii deterministlike kui ka stohhastiliste süsteemide optimaalse juhtimise sünteesimise meetodite väljatöötamine.
Lisaks on ebakindluse ja a priori teabe puudumise tingimustes väga olulised teabe kogumise ja töötlemise protsessi optimeerimise ülesanded (vaatluste haldamine ja optimaalne filtreerimine).
2. suund. Juhtimine ja optimeerimine mitmetasandilistes ja detsentraliseeritud organisatsioonilistes ja tehnilistes süsteemides
2.1. Haldamine ja optimeerimine võrgukesksetes süsteemides
Kaasaegseid keerukaid organisatsioonilisi ja tehnilisi süsteeme iseloomustavad kõrged mõõtmed, detsentraliseeritus, mitmetasandiline juhtimine, vajadus koolitust arvestava tegevuse efektiivse planeerimise järele, mitmekriteeriumilised otsused ja juhitavate õppeainete kajastamine.
Diskreetsete ja pidevate suurte mõõtmetega hajutatud mitmeühendusega süsteemide planeerimise ja juhtimise probleeme iseloomustavad ka mitmemõõtmelised protsessid mitte ainult ajas, vaid ka ruumi jaotus ja mitmemõõtmelisus ning need on üks keerukamaid. ja töömahukad optimeerimisprobleemide klassid. Sel põhjusel on soovitav välja töötada uurimismeetodid ja -käsitlused täpsete ja ligikaudsete lahenduste leidmiseks, samuti simulatsioonivahendid kasutamiseks otsustussüsteemides keerukate tehniliste, organisatsiooniliste (sh transport ja logistika) ja infosüsteemide planeerimisel, projekteerimisel ja haldamisel. .
Juhtida detsentraliseeritud organisatsiooniliste ja tehniliste süsteemide komponentide (võrgukesksed süsteemid, tootmissüsteemid, andmetöötlus-, telekommunikatsiooni- ja muud võrgud jne) grupi interaktsiooni sidekanalite piirangute ja arvutuste keerukuse, infotöötlusprotsesside omaduste tingimustes. , samuti piirangud otsuste tegemise ajale, arvutusvõimalustele ja sidekanalite võimsusele. Seetõttu on asjakohane välja töötada meetodid keerukate organisatsiooniliste ja tehniliste süsteemide struktuuri optimeerimiseks (arvestades loetletud piiranguid), sealhulgas paljude kriteeriumide samaaegse arvestamisega: lähteandmete detailsus, teabe kogumise tõhusus, planeerimine ja refleksiivne otsustamine. valmistamine, üksikute arvutite piiratud tootlikkus, töö dubleerimise vähendamine, samuti andmeedastuse teenindamisega seotud abiarvutuste osakaal.
Mitmetasandilisi ja detsentraliseeritud süsteeme iseloomustab hajutatud otsuste tegemine reaalajas teabe vastutegevuse tingimustes, samuti mittetäielik ja heterogeenne teave, mis on sageli mitme kriteeriumi kvalitatiivse ja subjektiivse iseloomuga. Seetõttu on vaja välja töötada meetodid adekvaatsete infotugisüsteemide loomiseks ning strateegiliste ja operatiivsete otsuste tegemise toetamiseks puuduliku teabe ja vastutegevuse tingimustes. Selleks on soovitatav eelkõige välja töötada: dünaamiliste organisatsiooniliste ja tehniliste süsteemide mitme agentuuri mudelid, sealhulgas konfliktsete agentidega võrgumudelid, rühma käitumise mudelid ja selle prognoosimine, huvide tasakaalu hindamine ja koalitsioonid nendes süsteemides, samuti infotehnoloogiate ja vahendite arendamine väliskeskkonna kohta teabe ja intelligentsete agentide teadmiste esitamiseks.
2.2. Intelligentne liikuvate objektide juhtimine
Määratud probleemide lahendamiseks ei saa alati luua kvantitatiivseid mudeleid, seetõttu kasutatakse programmis traditsiooniliste meetodite kõrval tehisintellekti meetodeid. Tehisintellekt kui teadmiste valdkond on viimase viiekümne aasta jooksul teinud läbi tohutu hüppe nii intelligentsi mõiste enda arendamisel ja selgitamisel kui ka tehisintellekti praktilise rakendamise valdkonnas erinevates inimtegevuse valdkondades: tehnoloogias, majanduses, äris, meditsiinis, hariduses jne. Paljud tehisintellekti teoreetilised kontseptsioonid ja meetodid on muudetud teadmistel põhinevateks rakenduslikeks intelligentseteks tehnoloogiateks.
Kaasaegse põlvkonna intelligentsete süsteemide eripära on see, et need põhinevad väliskeskkonna komplekssel mudelil, mis võtab arvesse nii kvantitatiivset informatsiooni kui ka kvalitatiivseid mudeleid – teadmisi erinevate keskkonnaobjektide võimalikust käitumisest ja nende omavahelistest suhetest. Selliste mudelite kasutamine sai võimalikuks tänu teadmiste esitamise meetodite väljatöötamisele, erinevatest allikatest pärit andmete integreerimise meetodite arendamisele ning arvutite kiiruse ja mälumahu olulisele kasvule.
Väliskeskkonna mudeli olemasolu võimaldab kaasaegsetel intelligentsetel liikuvate objektide juhtimise süsteemidel langetada otsuseid mitme kriteeriumi, ebakindluse ja riski tingimustes ning nende otsuste kvaliteet võib ületada inimese tehtud otsuste kvaliteeti teabe üleküllus, piiratud aeg ja stress.
Sellega seoses on kiireloomuline ülesanne töötada välja uued vahendid ja meetodid liikuvate objektide intelligentse juhtimise arendamiseks eespool loetletud tegurite olemasolul.
2.3. Mitmetasandiliste reaalajas info- ja juhtimissüsteemide modelleerimine ja optimeerimine
Sellesuunaliste uuringute asjakohasus on tingitud vajadusest töötada välja meetodid mitmetasandiliste avatud modulaarsete reaalajas info- ja juhtimissüsteemide (ICS RV) analüüsiks ja sünteesiks mitmerežiimiliste ja mitmeotstarbeliste objektide jaoks, mis töötavad ebakindlus, struktuursed häired ja hädaolukorrad (ESS). Nende kontrolliobjektide hulgas on kriitilised objektid ja vastutustundliku kasutamise süsteemid, mis määravad riigi julgeoleku.
On ilmne, et selle klassi süsteemide loomise probleeme ja ülesandeid saab edukalt lahendada ühtse teooria väljatöötamise ja selliste süsteemide dünaamilise ja stsenaariumianalüüsi ning selliste süsteemide struktuuri sünteesi, nende algoritmiliste programmipõhiste meetodite abil. , tarkvara ja teabe tugi ning mehhanismid tõhusate juhtimismeetmete väljatöötamiseks. Need hõlmavad eelkõige avatud infohaldussüsteemide projekteerimise formaliseeritud metoodika väljatöötamist, sealhulgas mudeleid ja meetodeid avatud arhitektuuriga objektorienteeritud I&C RT optimaalse modulaarse struktuuri sünteesimiseks vastavalt erinevatele efektiivsuskriteeriumidele. Dünaamilise analüüsi etapis saadud tulemuste põhjal sünteesitakse andmetöötluse ja juhtimise optimaalne funktsionaalne modulaarne struktuur, st määratakse RT IMS-i optimaalne koostis ja moodulite arv, sünteesitakse süsteemi liides ja struktuur selle tarkvara ja teabe tugi rakenduste sisendvoogude töötlemiseks.
Tegevuste kavandamiseks ja otsuste tegemise toetamiseks ebakindluse, struktuuriliste häirete ja hädaolukordade tingimustes on ICS RV-s soovitatav kasutada stsenaariumianalüüsi ja tõhusate kontrollimeetmete sünteesi meetodeid. Sel juhul moodustatakse struktuursete häirete ja hädaolukordade leviku matemaatiline mudel kaalutud või funktsionaalmärgiga graafikute keeles. Selle mudeli põhjal sünteesitakse objektide haldamise ratsionaalsed stsenaariumid, kasutades nende koostisosade jõudluspotentsiaali, vastupidavuse ja vastupidavuse kontseptsioone. Mitmerežiimiliste sihtobjektide hädaolukordade põhjuste ja tagajärgede kõrvaldamise stsenaariumide süntees viiakse läbi, võttes arvesse dünaamiliselt määratud aja- ja ressursipiiranguid. Samuti on vaja välja töötada formulatsioonid ja meetodid ebakindluse, struktuurihäirete ja hädaolukordade tingimustes töötavate mitmerežiimiliste ja mitmeotstarbeliste objektide vastupidavuse kontrolli pöördprobleemide lahendamiseks.
Eespool mainitud juhtimissüsteemide ja -objektide eripära, nende jaoks juhtimis-, analüüsi- ja optimeerimisprobleemide lahendamise teaduslik ja praktiline tähtsus võimaldavad sõnastada järgmised Programmi peamised eesmärgid ja eesmärgid.
1.2. Peamised eesmärgid ja eesmärgid
Programmi põhieesmärk on lahendada juhtimisteooria fundamentaalseid probleeme, mis takistavad paljulubavate riikliku tähtsusega projektide elluviimist keerukate dünaamiliste ja intelligentsete süsteemide haldamise valdkonnas tehniliste objektide ja protsesside liikumist reguleerivate tehnoloogiliste ja organisatsiooniliste rakendustega. süsteemid.
Uuringud viiakse läbi järgmistel üldistel teemadel.
1. suund
· Mittelineaarsete süsteemide stabiliseerimise meetodite väljatöötamine koordinaatide mittetäieliku mõõtmise ja juhtimisjõudude lubatud struktuuri piirangute korral.
· Robustse ja adaptiivse vaatluse ja juhtimise meetodite väljatöötamine juhtimisobjekti ja töökeskkonna parameetrite määramatuse deterministlike, tõenäosuslike ja muude mudelite alusel.
· Meetodite ja algoritmide väljatöötamine pidevate, diskreetsete ja mitmetasandiliste pidev-diskreetsete dünaamiliste mudelite kvalitatiivseks ja kvantitatiivseks analüüsiks ning redutseerimismeetodil põhinevaks juhtsünteesiks vektori ja maatriksi võrdlusfunktsioonide ja mudeliteisendustega.
· Uue klassi takistuslikes keskkonnas liikuvate mehaaniliste süsteemide optimaalse juhtimise probleemi uurimine sisekehade konfiguratsiooni või liikumise muutmise kaudu.
· Mehhaaniliste süsteemide löögi interaktsiooni kuivhõõrde olemasolul matemaatilise vormistamise ja probleemide lahendamise meetodite väljatöötamine.
· Diskreet-pidevate ja impulssdünaamiliste süsteemide optimaalse juhtimise meetodite väljatöötamine.
· Meetodite väljatöötamine mittelineaarsete objektide garanteeritud juhtimiseks, mis on avatud kontrollimatutele häiretele, dünaamiliste mängude vormis.
· Kvantsüsteemide juhtimise teooria väljatöötamine.
· Meetodite ja algoritmide väljatöötamine dünaamiliste omaduste, nagu stabiilsus, invariantsus, dissipatiivsus, analüüsimiseks oleku hindamiseks ja süsteemide mitmetasandilise juhtimise sünteesimiseks koos erinevatel tasanditel toimuvate protsesside dünaamika heterogeense kirjeldusega.
2. suund.1
· Meetodid juhtimisprobleemide lahendamiseks suuremahulistele võrgukesksetele hajutatud parameetritega süsteemide ja mitmeskaalaliste (ruumis ja ajas) protsessidega.
· Kommunikatsioonivõrgu detsentraliseeritud intelligentse hajutatud projektide ja programmide haldamise mudelid ja meetodid.
· Mitmetasandiliste ja detsentraliseeritud süsteemide struktuuri optimeerimise meetodid.
· Võrgukeskse juhtimise arvutirakenduse meetodid ja struktuurid hajutatud ja paralleelarvutuse matemaatiliselt homogeenses ruumis.
· Mittetäielikul, heterogeensel, kvalitatiivsel ja subjektiivsel informatsioonil põhinevad rühmaotsuste tegemise mudelid ja meetodid.
· Mudelid ja meetodid omavahel seotud operatsioonide komplekside planeerimiseks ja juhtimiseks keerulistes tehnilistes ning transpordi- ja logistikasüsteemides.
· Mitme agendi tehnoloogiatel põhinevate hajutatud tarkvara intelligentsete süsteemide loomise põhimõtete, arhitektuuri, meetodite ja algoritmide väljatöötamine.
· Infohalduse mudelite ja meetodite väljatöötamine mitme agentuuriga võrgustruktuurides.
Suund2.2
· Olukorra juhtimise üldistatud mudelite väljatöötamine, mis peegeldavad hägusate, närvivõrgu ja loogilis-dünaamiliste elementide kaasamise tunnuseid mudelite struktuuri.
· Marsruudi planeerimise meetodi väljatöötamine, mis tagab oma mudelesituses heterogeensete (kvantitatiivsete ja kvalitatiivsete) juhitavate dünaamiliste objektide rühma side stabiilsuse omaduse.
· Adaptiivsete reaalajas modelleerimisplatvormide analüüsi- ja sünteesimeetodite väljatöötamine, mis võtavad arvesse mittelineaarsust, multiühenduvust ja juhtimisobjektide kõrget dimensioonilisust, rakendades neid mere liikuvatele objektidele.
· Intelligentsete süsteemide optimeerimine konfliktikeskkonnas liikuvate objektide mitmetasandiliseks juhtimiseks, võttes arvesse nende grupi interaktsiooni, mitme kriteeriumi, ebakindlust ja riski.
· Meetodite väljatöötamine intelligentsete juhtimissüsteemide tehnilise visiooni pakkumiseks.
· Keerulist manööverdamist sooritavate dünaamiliste objektide intelligentse juhtimise meetodite väljatöötamine, mis põhinevad sundliikumise korraldamisel süsteemi olekuruumis.
Suund2.3
· Mudelid ja meetodid avatud arhitektuuriga objektorienteeritud mitmetasandiliste reaalajaliste info- ja juhtimissüsteemide modulaarse struktuuri analüüsimiseks ja optimeerimiseks määramatuse ja struktuursete häirete tingimustes.
· Elektrisüsteemide töörežiimide ja nende juhtimise analüüsimise ja optimeerimise meetodid.
· Juhtimisülesannete haavatavuspunktide otsimise stsenaariumi-indikaatori lähenemisviisi mudelid ja meetodid.
· Meetodid mitmemoodiliste protsesside modelleerimiseks, analüüsimiseks ja optimeerimiseks liikuvate objektide juhtimiseks.
· Meetodite ja algoritmide väljatöötamine mittelineaarsete mittestatsionaarsete objektide intelligentseks tuvastamiseks, et parandada juhtimise efektiivsust, moodustades tehnoloogilise teadmistebaasi, mis põhineb a priori teabel juhtimisobjekti kohta.
· Geoinfotehnoloogiad looduslik-tehnogeensete komplekside modelleerimiseks megalinnade ökosüsteemide haldamise probleemides.
· Navigatsiooni- ja juhtimissüsteemide teabetoe analüüs ja optimeerimine.
· Tootmisprotsesside juhtimise mudelid ja meetodid.
Väljatöötatud teooria ning juhtimissüsteemide analüüsi ja sünteesi meetodite tulemusi kasutatakse järgmistes valdkondades:
· liikluse juhtimine lennunduses ja astronautikas, maa- ja mereobjektidel, sõidukitel;
· mitme agentuuriga võrgukesksed süsteemid, tootmissüsteemid, andmetöötlus-, telekommunikatsiooni- ja muud võrgud ;
· transpordi- ja logistikasüsteemid ;
· globaalsed energia-, gaasitranspordi- ja muud suuremahulised taristusüsteemid;
· info tugisüsteemid juhtimisülesannete täitmiseks ning toetus strateegiliste ja operatiivsete otsuste tegemiseks puuduliku teabe ja vastutegevuse tingimustes.
Juhtsüsteemide konstrueerimise teooria põhiprobleemid nõuavad nende intensiivset arendamist. Sellesuunaliste uuringute arendamine võimaldab:
Teoreetiliste aluste väljatöötamine keeruka kolmikprobleemi juht-arvutus-kommunikatsioon lahendamiseks (probleem - " Kontroll- Arvutamine- Suhtlemine") keeruliste teabe- ja juhtimissüsteemide jaoks, sealhulgas sidekanalite piirangute ja alamsüsteemide rikete korral;
Lahendage liikuvate objektide, eriotstarbeliste objektide, tehnoloogiliste ja organisatsioonisüsteemidega seotud põhimõtteliselt uute objektide ja protsesside haldamise ülesandeid;
Luua tõhusad meetodid õhusõidukite ja muude liikuvate objektide juhtimissüsteemide funktsionaalseks diagnostikaks ja tõrketaluvuseks ning elektrisüsteemide dünaamilise stabiilsuse tagamiseks;
Parandage projekteerimislahenduste väljatöötamise kvaliteeti, kiirendage ja vähendage selle kulusid läbi juhtimissüsteemi arendusprotsessi algoritmiseerimise ja automatiseerimise.
Edaspidi mõistetakse juhtimist laiemas tähenduses, sealhulgas sidevõrk, rühm, hajutatud juhtimine (ingliskeelses kirjanduses - kontroll võrkudes, kontroll võrkude üle, hajutatud juhtimine jne)